
How Can We Help?
INAV Fixed Wing Landing
Introduction
INAV supports advanced automatic landings for fixed wing aircraft from version 7.1. The procedure is based on landings for man-carrying aircraft, so that safe landings at a specific location are possible. Supported are landings at Safehome after “Return to Home” or at a defined LAND waypoint for missions. Every landing locations can be defined with a target point and 2 different approach headings (colinear to the landing strips) with exclusive direction or opposite directions allowed. This enables up to 4 different approach directions, based on the landing site and surrounding area.
General procedure:
- After reaching Safehome/LAND Waypoint the altitude is corrected to “Approach Altitude”.
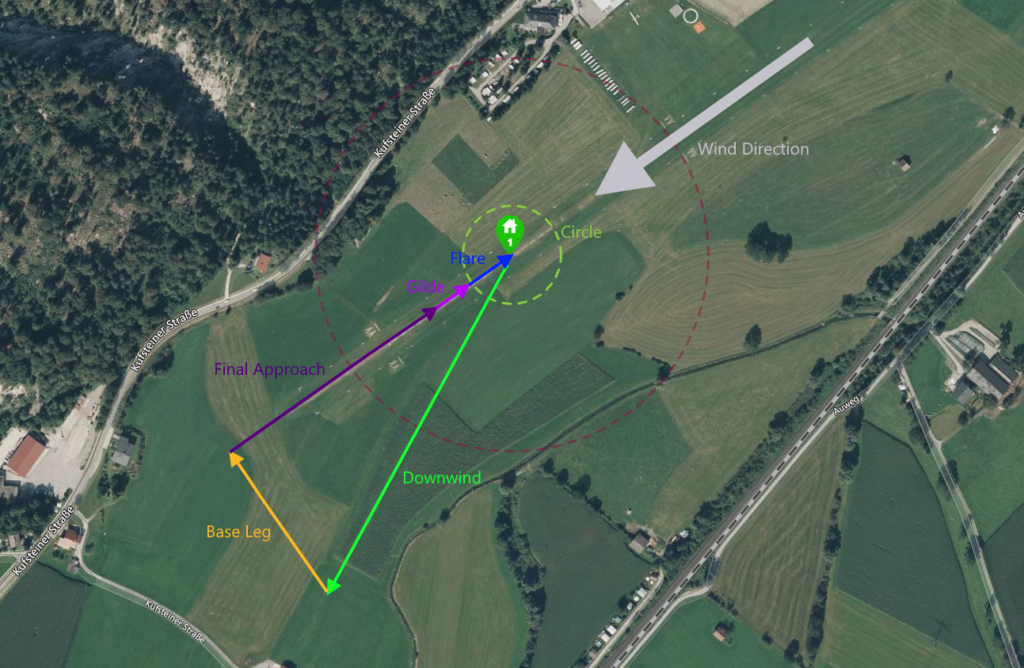
- The aircraft circles for at least 30 seconds to determine the wind direction and strength.
- The landing direction and the approach waypoints are calculated on the basis of the measured wind parameters. If no headwind landing is possible or the wind strength is greater than “Max. tailwind” (see Global Parameters), return to point 2.
- The landing is initiated. The aircraft flies the downwind course, “Approach Altitude” is held.
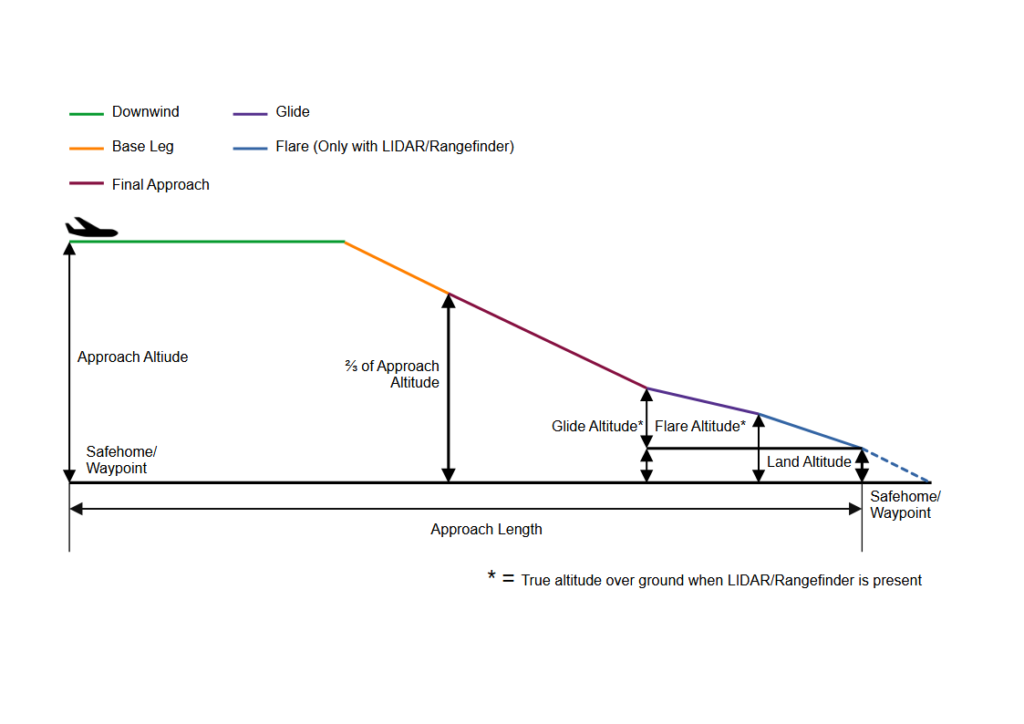
- Base Leg: the altitude is reduced from 2/3 of “Approach Altitude”.
- Final Appraoch: The engine power is reduced using “Pitch2throttle modifier” to reduce speed and the altitude is gradually reduced towards “Land Altitude” while approaching the Safehome coordinates.
- Glide: When “Glide Altitude” is reached, the motor is switched off and the pitch angle of “Glide Pitch” is held.
- Flare: Only if a LIDAR/Rangefinder sensor is present: the motor remains switched off and the pitch angle of “Flare Pitch” is held
- Landing: As soon as INAV has detected the landing, it is automatically disarmed, see setting
nav_disarm_on_landing.
To activate the automatic landing, the parameter nav_rth_allow_landing must be set to ALWAYS or FAILSAFE.
Warning
If landing is activated and no parameters are set for the landing site (Safehome and/or landing waypoint), the old landing procedure (circling until close to the ground, then hovering out) is performed. This is probably not what you want.
Landing site parameters
The following parameters are set for each landing site (Safefome/LAND waypoint):
All settings can also be conveniently made in the Configurator via Mission Control.
CLI command fwapproach: fwapproach <index> <Approach altitude> <Land altitude> <Approach direction> <approach heading 1> <approach heading 2> <sea level>
fwapproach has 17 slots in which landing parameters can be stored. In slot 0-7 the landing parameters for Safehome are stored, in 8 – 16 the parameters for waypoint missions. Only one landing point per mission can be saved.
- index: 0 – 17, 0 – 7 Safehome, 8 – 16 Mission
- Approach direction: 0 – Left, 1 – Right. Always seen from the primary landing direction (positive value), i.e. whether the aircraft flies left or right turns on approach.
- Approach Altitude: Initial altitude of the approach, the altitude at which the wind direction is determined and the downwind approach, in cm
- Land Altitude: Altitude of the landing site, in cm
- Approach heading 1 and 2: Two landing directions can be set, values: 0 – +/-360. 0 = landing direction is deactivated. A positive value means that you can approach in both directions, a negative value means that this direction is exclusive. Example: 90 degrees: It is possible to land in 90 degrees as well as in 270 degrees. -90 means that you can only land in a 90 degree direction. This means that practically 4 landing directions can be saved.
- Sea Level: 0 – Deactivated, 1 – Activated. If activated, approach and land altitude refer to normal zero (sea level), otherwise relative altitude to the altitude during first GPS fix.
Caution
The Configuator automatically determines the ground altitude based on databases on the Internet, which may be inaccurate. Please always compare with the measured GPS altitude at the landing site to avoid crashes.
Global parameters
All settings are available via “Advanced Tuning” in the Configurator.
nav_fw_land_approach_length: Length of the final approach, measured from the land site (Safehome/Waypoint) to the last turning point. In cm. Max: 100000, Min: 100, Default: 35000nav_fw_land_final_approach_pitch2throttle_mod: Modifier for pitch to throttle ratio at final approach. This parameter can be used to reduce speed during the final approach. Example: If the parameter is set to 200% and Pitch To Throttle Ratio is set to 15, Pitch To Throttle Ratio is set to 30 on the final approach. This causes a reduction in engine power on approach when the nose is pointing downwards. In Percent. Min: 100, Max: 400, Default: 100nav_fw_land_glide_alt: Initial altitude of the glide phase. The altitude refers to “Landing Altitude”, see above under “Landing site parameters” In cm. Min: 100, Max: 5000, Default: 200nav_fw_land_flare_alt: Initial altitude of the flare phase. The altitude refers to “Landing Altitude”, see above under “Landing site parameters” In cm. Min: 0, Max: 5000, Default: 200nav_fw_land_glide_pitch: Pitch value for glide phase. In degrees. Min: 0, Max: 45, Default: 0nav_fw_land_flare_pitch: Pitch value for flare phase. In degrees. Min: 0, Max: 45, Default: 8nav_fw_land_max_tailwind: Max. tailwind if no landing direction with downwind is available. Wind strengths below this value are ignored (error tolerance in the wind measurement). Landing then takes place in the main direction. If, for example, 90 degrees is configured, landing takes place in this direction, NOT in 270 degrees (see above). In cm/s. Min: 0; Max: 3000, Default: 140
General paramters and tuning tip
nav_fw_wp_tracking_accuracy: Its highly recommended that this parameter is used and tuned well. Only with WP-Tracking enabled, the Aircraft will try to precisely align with the runway during approach. If WP-Tracking is not used, the Plane will head straight to the landiung location without flying in line with the intended landing strip. Wind can intensively alter the final landing heading.nav_fw_pitch2thr: The navigation throttle modifier has to be tuned well to allow stable navigation during climbs and descents to prevent a stall. Make sure your plane maintains Ground or Airspeed, when climbing in any navigation mode. The Craft should not get slower and not speed ub significantly during a navigation climb, if P2T is tuned properly.nav_wp_radius: This parameter might be too high if you have set up your craft with INAV 6 or INAV 7. With a too high value, the turning points for the Crosswind-Leg and Final Approach are hit too early and make it difficult for the plane to align to the runway or cut short the approach. Make sure this parameter is not set greater than 1000 (cm). The better your craft and navigation system is tuned, the lower this value can be. We recommend to start with 1000 for flying wings and 800 for a Plane with Tail.- Test your Navigation-Tuning: A better Navigation-Tune will reward you with smoother and more reliable landings. To test your nav systems limit, we recommend to create a waypoint missions with many 90° turn angles with shorter and shorter tracks. With this Method, you can find out how well your plane can follow a navigation path and how long it takes to align to a waypoint track. A well tuned plane should be able to pull of a WP Mission that looks like this, where the distance between WP6 and WP7 si recommended to be the minimum approach length:

Waypoint missions
Only one landing waypoint per mission can be active and saved and the landing waypoint must be the last waypoint of the mission. If the altitude of the waypoint and the “Approach Altitude” are different, the altitude of the waypoint is approached first and then the altitude is corrected to “Approach Altitude”.
Logic Conditions
The current landing state can be retrieved via ID 41 in “Flight” (FW Land State). This allows additional actions to be executed according to the landing phases, e.g. deployment of the landing flaps.
| Returned value | State |
|---|---|
| 0 | Idle/Inactive |
| 1 | Loiter |
| 2 | Downwind |
| 3 | Base Leg |
| 4 | Final Approach |
| 5 | Glide |
| 6 | Flare |