

About Synerduino Arduino
The Synerduino Arduino Shield can be called a Classic series Reborn adapted to use the popular Arduino UNO and Mega development board it bridges the Knowledge Gap between your basic Arduino robotics and Drone platforms. As you would be using the same Arduino to fly a mission capable drone.
Beginner Friendly
Its Light weight Programming offers Ease of use and programmability compare of other controllers of similar classes .
Capability
Synerduino shield serves as an all-in-one flight controller essential board that fits on Arduino Mega 2560 and Uno. Equipped with all the necessary sensors, power management, and pin headers, it turns the Arduino development board into a Robotic Vehicle controller .
Is perfect for hobbyists, educators, students, researchers, and everyone who wants to learn more in building their own Autonomous platforms. Its simple Arduino shield design makes it a versatile and highly customizable to suit your Drone and Robotics building and learning needs.
Feature Support
- Direct ADC sensor input for industrial Sampling, selector Via solder Pads
- M6-M8 UBLX GPS Protocol (GPS w/ Flash Required)
- M6-M10 NMEA GPS Protocol (GPS w/ Flash Required)
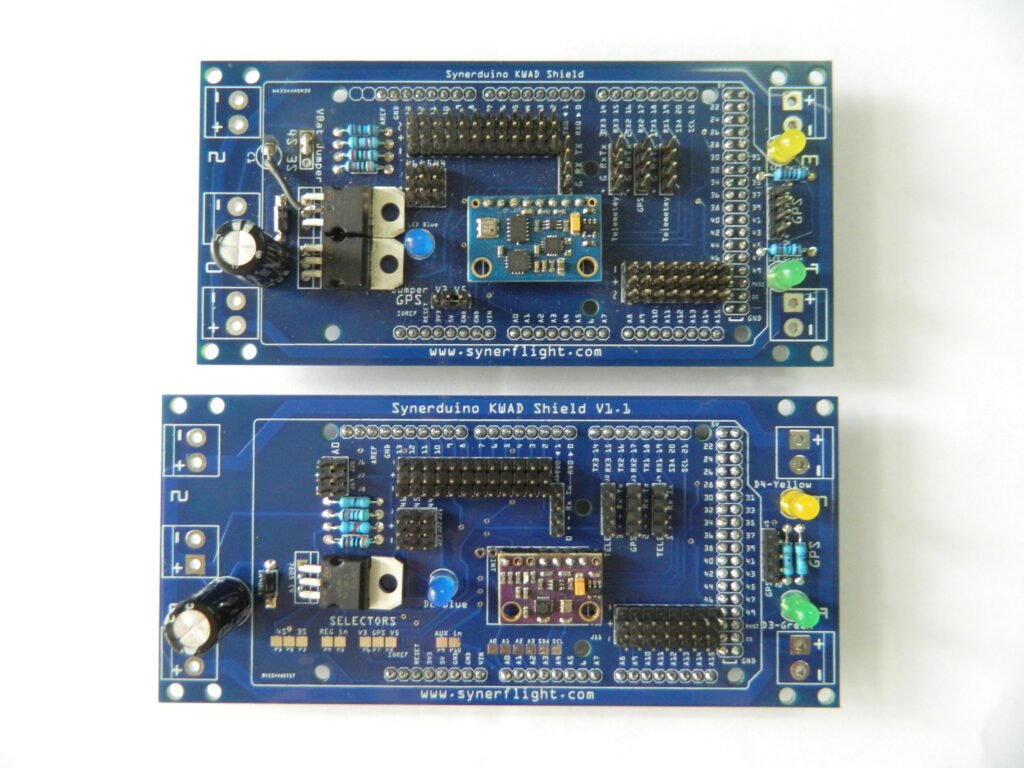
- Synerduino Ardu V1.1
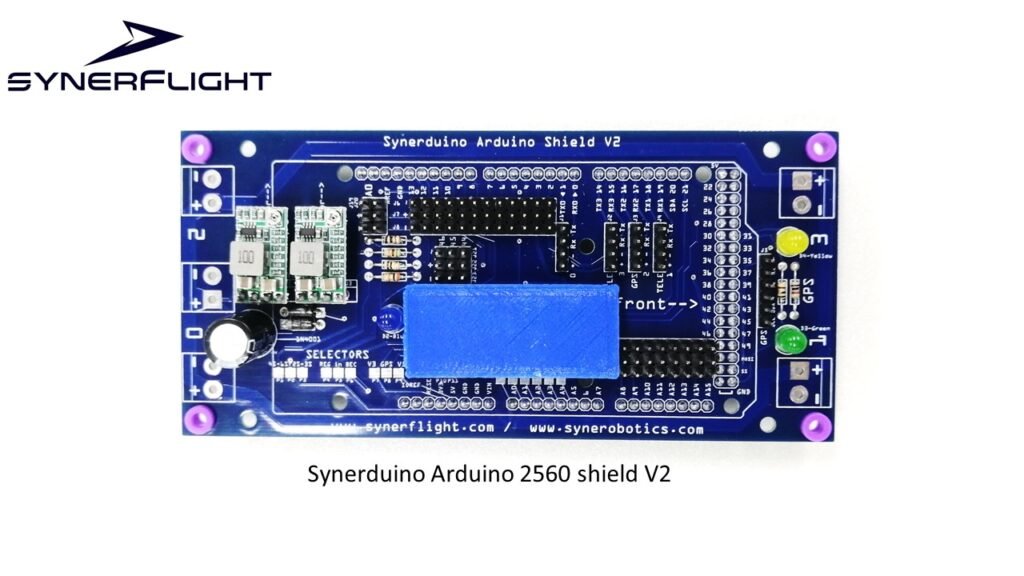
- Synerduino Ardu V2.0
- Documentation
- Downloads
- Addon Integration
- Image
- Video
- Drawings
- 3D Print
- Reference
- Simulator
Physical
- Dimensions: 128 x 62 x 28 mm LWH / (V1.1)135mm x 62mm x 28mm
- Weight: 46.1g
- 4 Solder Pads for 4 ESCs and Motors
- 15 3-Pin Digital Headers
- 8 3-Pin Analog Headers
- 5 4-Pin Serial Headers
Power
- Input Voltage from Arduino Board: 3.3-5V
- PWM Power Rail Regulated – 5V at 1.5A
- Drone Power Input Voltage – 12.6V (3S) or 16.8V (4S)
- Power Distribution Lines – 80A
Sensors Beta (GY801)
- Accelerometer: ADXL345
- Gyroscope: L3G4200D
- Magnetometer: MMC5883
- Barometer: BMP180 – 85
- GPS Setup – NMEA Protocol (As Preset in Firmware Hex file )
Sensors V1.1 (GY91)
- Gyroscope + Accelerometer: MPU6050
- Magnetometer: AK8963
- Barometer: BMP280
- GPS Setup – UBLOX Protocol (As Preset in Firmware Hex file )
Physical
- Dimensions: 128 x 62 x 28 mm LWH / (V1.1)135mm x 62mm x 28mm
- Weight: 46.1g
- 4 Solder Pads for 4 ESCs and Motors
- 15 3-Pin Digital Headers
- 8 3-Pin Analog Headers
- 5 4-Pin Serial Headers
Power
- Input Voltage from Arduino Board: 3.3-5V
- PWM Power Rail Regulated – 5V at 1.5A
- Drone Power Input Voltage – 12.6V (3S) or 25.2V (6S)
- Power Distribution Lines – 80A
Sensors V2.0 (GY91)
- Gyroscope + Accelerometer: MPU6050
- Magnetometer: QMC5883P/QMC5883 / HMC5883
- Barometer: BMP280
- GPS Setup – M6-M8 UBLOX Protocol / M9-M10 NMEA protocol
Vehicle Documentation
Compatible Apps List
Synerduino Firmware
Note: XLoader is use to upload premade Hex files to Arduino board Calibration & firmware
ESC Calibration Hex Firware
Synerduino ESC Calibration .hex
this is to calibrate the ESC. see quick guid.pdf for instructions
Multirotor Hex Firware
Synerduino Firmware Multirotor .hex 2-24-2025
Synerduino Firmware Multirotor .hex 10-5- 2020
Multirotor PID preset
Fixwing Hex Firmware
Synerduino Special Airplane Hex 2025
Synerduino Special Airplane Hex 2023
Synerduino Legacy Airplane Hex 2025
Synerduino Legacy Airplane Hex 2021
Fixwing PID preset
Surface Vehicle Hex Firmware
Synerduino Firmware Surface RX Fusion.hex 2025
Synerduino Firmware Surface.hex 2025
Synerduino Firmware Surface.hex 2021
Surface PID preset
Misc. files
Note: unzip files and open .ino in Arduino IDE go to Config.h tab and uncomment your settings
Synerduino Multirotor Ino
pls see documentation and its associated sensors inorder to download the version that matches your board, this is Arduino IDE Versions of the said firmware
Current Release
Older Release
- (Arduino 1.8.5) SynerduinoKwad4-GY801-GY91
- (Arduino 1.8.16) SynerduinoKwad4-GY801-GY91-1.8.16
- (Arduino 1.8.16 – 2.0.0) SynerduinoGY91-1.8.6-2.0.0
- (For UNO boards)Synerduino-Uno-GY91-801
Synerduino Fixwing
Current Release
Synerduino Special/Legacy Airplane5 02 8 2025
Older Release
Synerduino Legacy Airplane5 21 2 2025
Synerduino Airplane -M9 -M10 02 06 2024
Synerduino Fixwing Special 21 2 2025
Synerduino Fixwing Special 02 09 2024
Special Airplane Legacy (2023) M5-M6 NMEA, M7-M8 UBX
- Synerduino Special Airplane 3 GY91
- Synerduino_Special_Airplane-2-GY91-1.8.16
- SynerduinoWingPlane3-GY801
Airplane Legacy (2023) M5-M6 NMEA, M7-M8 UBX
- (Arduino 1.8.5) SynerduinoPlanes4-GY91-GY801
- (Arduino 1.8.18)SynerduinoPlane4-GY91GY801-1.8.18
- (PatrikE codes with updated sensors )MultiWii_FW_synerduino
Synerduino Surface Special INO
Current Release
Synerduino Special surface 2-8-2025
Older Release
Synerduino Special surface 24-2-2025
Synerduino Special surface 9-2-2024
Synerduino Arduino Special surface 2023
For Synerduino Surface (2023)
- Synerduino Surface UNO
- 27 02 2022 Synerduino-Surface-GY91-GY801
- (Arduino 1.8.18) SyneduinoTankBoat-GY91GY801-1.8.18
- (Arduino 1.8.5) SynerduinoTankBoat5.ino (GY91 & GY801)
- (Arduino 1.8.2) SynerduinoTankBoat4.ino (GY91 & GY801)
Synerduino Arduino offers an means to add on integrated features to your drone mission capability in the most Arduino DIY way
Note: if your packing more than two sensors or additional micro controllers on to your Drone we advice to use an ESC with a BEC or an External BEC to power those sensors : see Synerduino basics guide on power setup
Note: these are Provided as samples for users to implement their own hardware.
Hardware Implementation
need more power ? Synerduino Drone Powersupply and Distribution should allow for expanded capacity
Quad
 |
Synerduino Beta and V1.1 Board |
 |
Multirotor |
 |
Fixwing |
 |
Ground Vehicle |
 |
Boat |
 |
Missions |
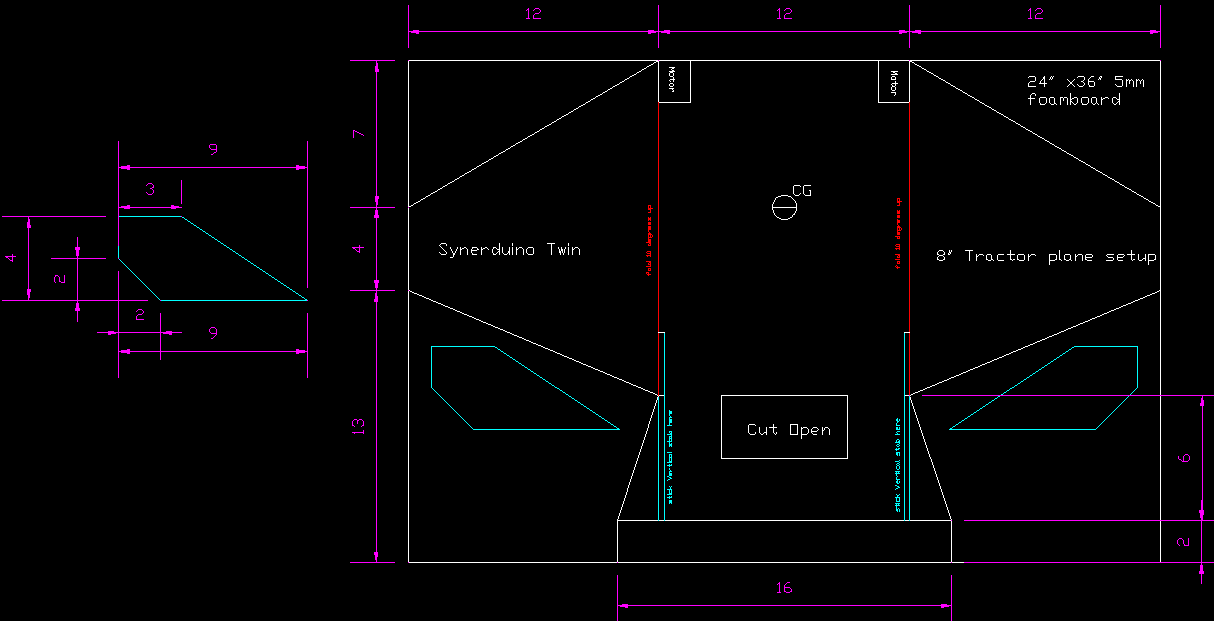
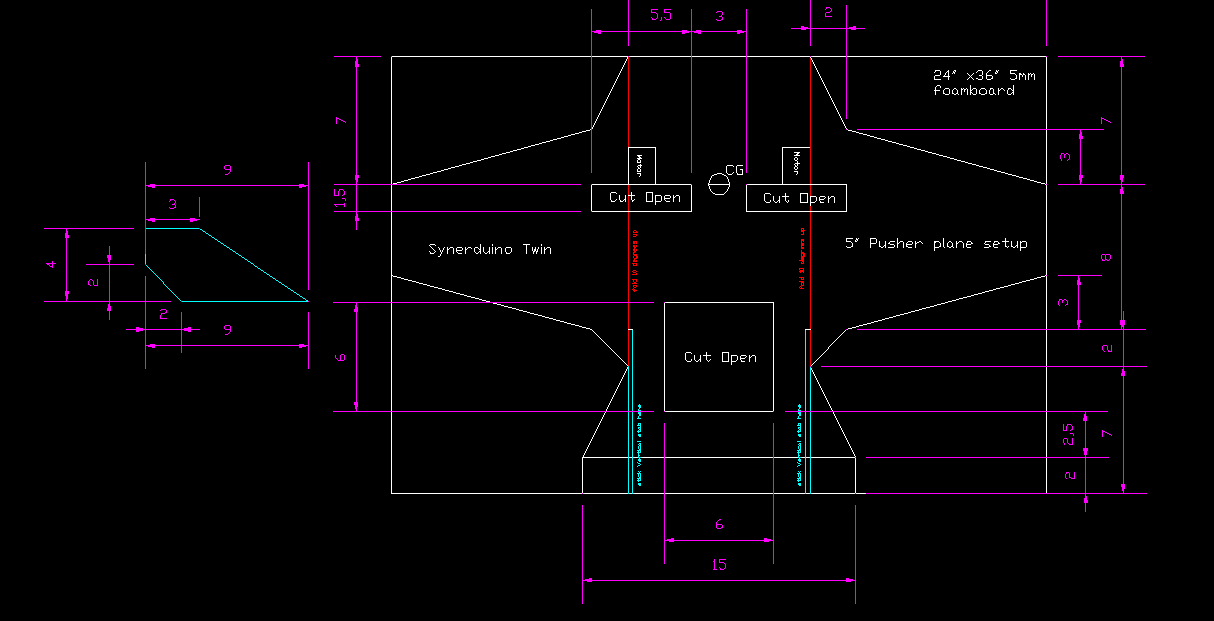
Foamboard fixwing
Synerduino Twin Airplane
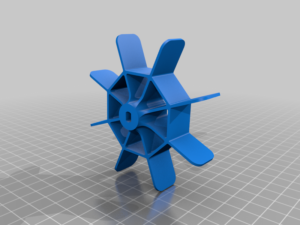
3D Print stl
Synerduino Twin Boat


3D Printed files
pls check the stl file and the printer settings prior to print
PLA
Layer 0.15
Shell 1.2
Print speed 90-100
Print Temp 205c
Bed Temp 55
ABS
Layer 0.15
Shell 1.2
Print speed 40-50
Print Temp 245c
Bed Temp 95
Phone Holder

Quadcopter
Tricopter frame

this 300mm drone requires an MG996R Servo at the tail and uses the round servo horn to mount the tail motor mount and at least one ESC with UBEC of 2A to support the servo power requirment
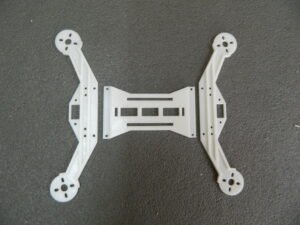
FPV frame Adaptor

allows synerduino to fits to most frames with mounting holes of 30.5×30.5mm, 20x20mm, and 25.5×25.5mm

Airplane



Boat

Sets Compatible with the yellow 120 motor TT Gearbox with 65mm wheel set

Rover

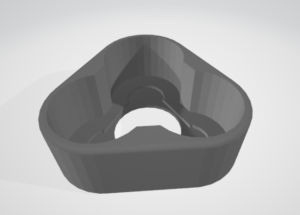
IMU Sensor box for Synerduino board

Mag sensor box for Rideon Toy

LIDAR TF Mini Housing

this is Extended Source Referece online from other People that can be useful for your project as well
Note: this is not handle by Synerflight and precaution taken each are develop by their respective developers and specific IDE
Python interface
Android Studio interface
Processing.org interface
ReefWing Multiwii GUI Processing
WIFI ESP Browser Interface
Simulator
For Beginners who wish to learn how to fly a Drone we can recommend this link

https://www.realdronesimulator.com
Trainer cord PPM
Require a Game Controller or a Radio Transmitter with PPM Trainer cord or USB dongle this Virtual Port comes useful
This app require PL jack input to your computer Aux Mic input
The Shield Kit includes the following items:
1x GPS
1x Bluetooth
5x JR Servo Plug
1x DUPONT Line (V1.1)
2x DUPONT Line (V0 Beta)
List of features:
Compatible with MultiWii (open source RC multi rotor flying platform)
Compatible with Arduino Mega 2560 and Uno
Ground Station with Flywii GUI
IMU 10DOF
Supports 3S/4S Batteries
4 Output ESC Pads
Mode Selection Pads (V1.1)
ADC sensor input (V1.1)
Highly customizable