
Synerduino STM
Synerduino STM is an 32Bit version of the Synerduino family it allows for more faster processes into your Robotics & Drones application.
Synerduino STM is an STM32 base platform that brings advance functionally to your Drone Project while retaining the Arduino form factor allowing to be compatible with Arduino ecosystem makes integration quicker.
as a tool for research developers and Industry Validaions
Synerduino STM is Pixhawk Compatible with the INAV & Ardupilot firmware . using a wide range of GCS such as INAV , MWPTools , Qground control , Mission Planner , Tower , Speedybee

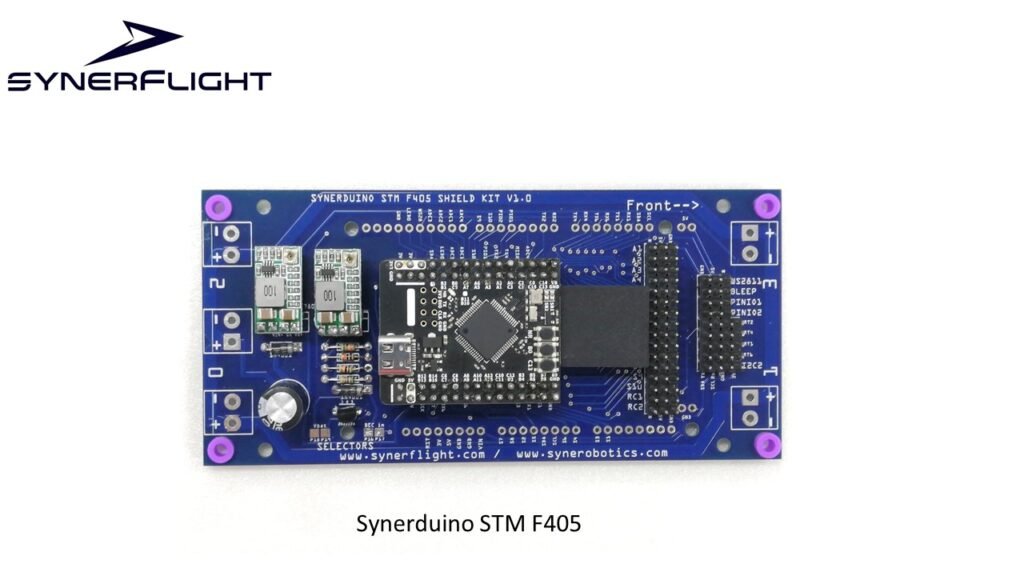
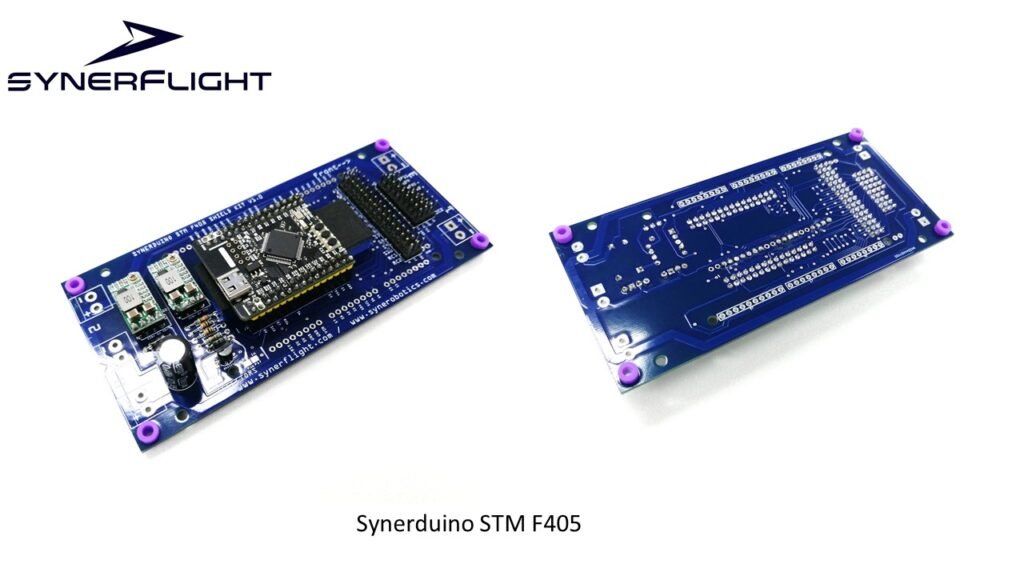
- STM32F405 Shield
- STM32H743 Shield
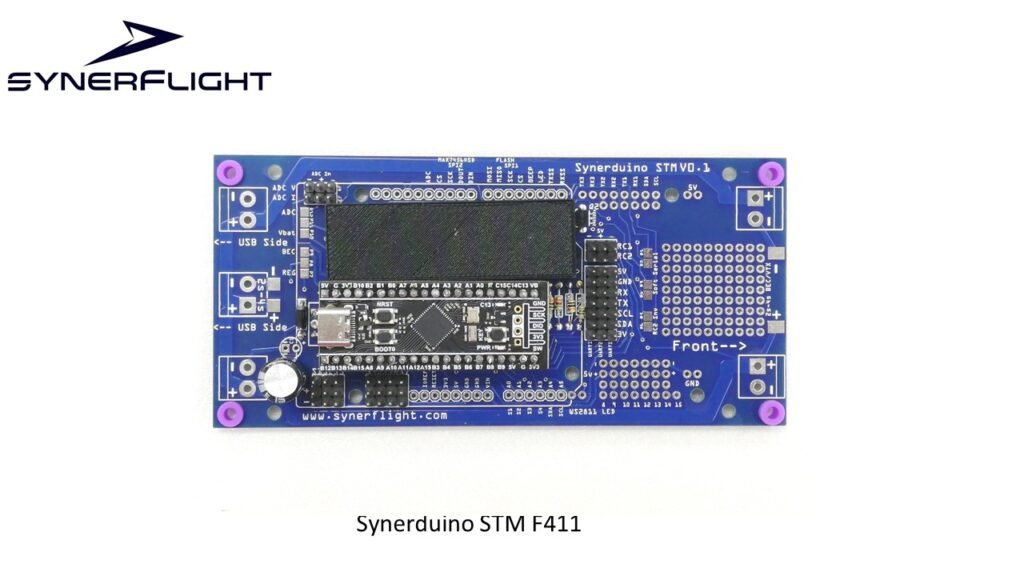
- STM32F411 Shield
- INAV Doc
- INAV Downloads
- APM Doc
- APM Download
- Addon integration
- Drawings
- Image
- Video
- 3D Print
- Simulator
STM32F405 Base Synerduino Shield for Advance users
Physical
- Dimensions: 128 x 62 x 28 mm LWH / (V1.1)135mm x 62mm x 28mm
- Weight: 46.1g
- Arduino Prototyping Shield Footprint
- 4 Solder Pad set s for 4 ESCs and Motors
- DIY section for component addons
- 10 3-Pin PWM Headers S1-S10
- 2 3-Pin RC Headers w/ Sbus inverter
- 4 4-Pin Serial Headers
- 4 3pin ADC in (Voltage and Current)
- 2 RC Serial input Pin
- 1 WS2811 LED output
- 2 PIN IO (User Action)
Power
- WS2811 LED Power 5V 3A
- Serial Power Rail – 3.3V 3A
- PWM Power Rail Regulated – 5V 3A
- Drone Power Input Voltage – 12.6V (3S) or 25.2V (6S)
- Power Distribution Lines – 12.6V-25.2V 80A
- Note: 8S – 12S Use External UBEC 5V to the main power input and external ESC Power distribution
Processor
- Processor: STM32F405RGT6
Sensors
- GYRO/ACC: BMI160 (Align CW 0)
- MAG:
- V1 HMC5883/QMC5883 (Align CW 180)
- V2 QMC5883P
- BARO: BMP180/280
Firmware
- Firmware: INAV Flight / Ardupilot
Serial Pins Ardupilot
- Serial1 – UART1 – Mavlink2 – Telem1
- Serial2 – UART2 – RCIN – SerialRC – Receiver goes here
- Serial4 – UART4 – GPS – Set Baud 57600
- Serial6 – UART6 – Open
Serial Pins INAV
- Serial 1 – UART1 -Telemetry or Serial OSD
- Serial 2– UART2 – RC RX
- Serial 4 – UART4 – GPS – Set Baud 57600
- Serial 6 – UART6 – Open
7 PWM MR/FW pin
- (S1-S10 )
Logging
- Tethered Logging
STM32H743 Base Synerduino Shield for Advance users

Physical
- Dimensions: 128 x 62 x 28 mm LWH / (V1.1)135mm x 62mm x 28mm
- Weight: 46.1g
- Arduino Prototyping Shield Footprint
- 4 Solder Pad set s for 4 ESCs and Motors
- DIY section for component addons
- 10 3-Pin PWM Headers S1-S10
- 2 Aux PWM Headers S11-S12
- 2 3-Pin RC Headers w/ Sbus inverter
- 7 4-Pin Serial Headers
- 4 3pin ADC in (Voltage and Current)
- 2 RC Serial input Pin
- 1 WS2811 LED output
- 2 Pin IO (User Action)
Power
- WS2811 LED Power 5V 3A
- Serial Power Rail – 3.3V 3A
- PWM Power Rail Regulated – 5V 3A
- Drone Power Input Voltage – 12.6V (3S) or 25.2V (6S)
- Power Distribution Lines – 12.6V-25.2V 80A
- Note: 8S – 12S Use External UBEC 5V to the main power input and external ESC Power distribution
Processor
- Processor: STM32H743VIT6
Sensors
- GYRO/ACC: BMI160 (Align CW 0)
- MAG:
- V1 HMC5883/QMC5883 (Align CW 180)
- V2 QMC5883P
- BARO: BMP180/280
Firmware
- Firmware: INAV Flight / Ardupilot
Serial Pins Ardupilot
- Serial1 – UART1 – Mavlink2/MSP – Telem1
- Serial2 – UART2 – Mavlink2/MSP/RCIN – Telem2/Serial RX
- Serial3 – UART3 – GPS – Set Baud 57600
- Serial4 – UART4 – GPS – Set Baud 57600
- Serial5 – UART6 – RCIN – Serial RX
- Serial6 – UART7 – 0pen
- Serial7 – UART8 – 0pen
Serial Pins INAV
- Serial 1 – UART1 -Telemetry or Serial OSD
- Serial 2 – UART2 – RC RX
- Serial 3 – UART3 – GPS – Set Baud 57600
- Serial4 – UART4 – Open
- Serial6 – UART6 – RC RX
- Serial7 – UART7 – 0pen
- Serial8 – UART8 – 0pen
7 PWM MR/FW pin
- (S1-S10 Main )
- (S11-S12 Aux pin)
Logging
- BlackBox SD card
- Tethered Logging

STM32F411 Base Synerduino Shield for Advance users
Physical
- Dimensions: 128 x 62 x 28 mm LWH / (V1.1)135mm x 62mm x 28mm
- Weight: 46.1g
- Arduino Prototyping Shield Footprint
- 4 Solder Pad set s for 4 ESCs and Motors
- DIY section for component addons
- 7 3-Pin PWM Headers S1-S7
- 2 3-Pin RC Headers w/ Sbus inverter
- 3 7-Pin Serial Headers
- 2 3pin ADC in (Voltage and Current)
- 2 RC Serial input Pin
- WS2811 LED output
Power
- WS2811 LED Power 5V 1.5A
- Serial Power Rail 5V 1.5A
- PWM Power Rail Regulated – 5V 1.5A
- Drone Power Input Voltage – 12.6V (3S) or 16.8V (4S)
- Power Distribution Lines – 12.6V-25.2V 80A
- Note: 8S – 12S Use External UBEC 5V to the main power input and external ESC Power distribution
Processor
- Processor: STM32F411CEU6 BlackPill
Sensors
- GYRO/ACC: BMI160 (Align CW 0)
- MAG: HMC5883/QMC5883 (Align CW 180)
- BARO: BMP180/280
Firmware
- Firmware: INAV Flight
Serial Pins INAV
- Serial 1 -Telemetry or Serial OSD
- Serial 2 – RC PX
- Serial S – GPS – Set Baud 57600
7 PWM MR/FW pin
- MR motor (S1-S6 ) Servo (S7)
- FW Motor (S1-S2) Servo (S3-S7)
Logging
- Tethered Logging


Main Documentation for SynerduinoSTM series use
- Synerduino STM-F411
- Synerduino STM-F405
- Synerduino STM-H743
the Synerduino STM Dev Module comes Flashed , preloaded and Configure on INAV to Run with a 250mm Synerduino Kwad setup , However there are things you need to check and Validate base on your setup
- Reciver RC Mapping
- Magnetometer Orientation
- Tuning and Advance Tuning setup
- Modes – flight mode selection base on your remote
- Ports – Assign Port should it be change
- GPS Type – NMEA ,UBLOX ,UBLOX7
All other Downloadable files are available at the Download Tab
- Configurator
- GCS App
- Hexfile
- Target file
- side Documention
Synerduino STM Documentation
Introduction Synerduino STM 2026
Preparation Synerduino STM 2026
Vehicle INAV Synerduino STM 2026
Synerduino Multirotor Frame assembly
Synerduino Frame Documentations
Telemetry Documentation
GPS Documentation
INAV Documentation Articles
INAV Video Articles
Synerduino Target
Side Note
Drone wont Arm
- its not Level Or Calibrated
- GPS mode is active w/o GPS Fix
- has GPS configure active while indoors
- throttle isnt on 0% – 1000ms input signal too low or too high
Flying the Wrong Direction
- Check Compass orientation
- Check Radio input and reverse RC input
Notes:
- Synerduino STMF405 UART runs on 3.3V
- Synerduino STMH743 Gnd Rails are only active with ESCs Installed
DFU mode
- Method 1: When the power is on, press the BOOT0 key and the reset key, then release the reset key, and release the BOOT0 key after 0.5 seconds
- Method 2: When the power is off, hold down the BOOT0 key, and release the BOOT0 at 0.5s after the power is on
- DFU Mode: Use the data line to connect to the computer. If there is an unrecognized problem, you can heat the chip appropriately (25°C) and then re-enter the ISP mode
- if the Processor is installed to the Synerduino shield power it with the battery for one min to preheat the crystal
- http://efton.sk/STM32/gotcha/g125.html
INAV Documentation Videos
pls check FPV University channel for Other INAV related videos and documentations
https://www.youtube.com/@FPVUniversity
Note: INAV is an Active development and Weekly updates and quarterly Major updates happends


INAV Configurator Windows
INAV Configurator 5.1.0 Win64.zip
INAV Configurator 6.1.0 Win64.zip
INAV Configurator 7.1.0 Win64.zip
INAV Configurator 7.1.1 Win64.zip
INAV Configurator 7.1.2 Win64.zip
INAV Configurator 8.0.0 Win64.zip
INAV Configurator 9.0.0 Win64.zip
INAV Configurator 9.0.2 Win64.zip
INAV Configurator 9.1.1 Win64.zip
INAV Configurator LINUX
INAV Configurator 6.0.0 Linux.zip
INAV Configurator 6.1.0 Linux.deb
INAV Configurator 7.1.0 Linux64.deb
INAV Configurator 7.1.1 Linux64.deb
INAV Configurator 8.0.0 Linux64.deb
INAV Configurator 9.0.0 Linux64.deb
INAV Configurator 9.0.2 Linux64.deb
MWPTOOLS Windows
MWPTools Linux
INAV BlackBox Explorer
Compatible Apps List
Synerduino STM Hex File Firmware
for Synerduino Flight controllers
Note the Version of the Firmware Hex and Configurator Application must be same to ensure compatibility of functional Features
Right click select Save As Link as download
Synerduino STM F411
INAV 5
Synerduino STM F411 Hex INAV 5.1.0.zip
INAV 6
Synerduino STM F411 Hex INAV 6.0.0.zip
Synerduino STM F411 Hex INAV 6.1.0.zip
INAV 7
Synerduino STM F411 Hex INAV 7.0.0.zip
Synerduino STM F411 Hex INAV 7.1.0.Hex
Synerduino STM F411 Hex INAV 7.1.1.Hex
Synerduino STM F411 Hex INAV 7.1.2.Hex
Synerduino STM F411 Hex INAV 7.1.2-1.Hex 2025
INAV 8
Synerduino STM F411 Hex INAV 8.0.0.RC3 Hex
Synerduino STM F411 Hex INAV 8.0.0.Hex
Synerduino STM F411 Hex INAV 8.0.1.Hex 2024
Synerduino STM F411 Hex INAV 8.0.1-1.Hex 2025
INAV 9
Synerduino STM F411 Hex INAV 9.0.0 RC3.Hex 2025
Synerduino STM F411 Hex INAV 9.0.0 .Hex 2026
Synerduino STM F411 Hex INAV 9.0.1 .Hex 2026
Synerduino STM F411 Hex INAV 9.1.0 .Hex 2026
Synerduino STM F405
INAV 7
Synerduino STM F405 Hex INAV 7.0.0.Hex
Synerduino STM F405 Hex INAV 7.1.0.Hex
Synerduino STM F405 Hex INAV 7.1.1.Hex
Synerduino STM F405 Hex INAV 7.1.2.Hex
Synerduino STM F405 Hex INAV 7.1.2-1.Hex 2025
INAV 8
Synerduino STM F405 Hex INAV 8.0.0.RC3 Hex
Synerduino STM F405 Hex INAV 8.0.0 Hex
Synerduino STM F405 Hex INAV 8.0.1 Hex
Synerduino STM F405 Hex INAV 8.0.1-1 Hex 2025
Synerduino STM F405A Hex INAV 8.0.1-1 Hex 2025
INAV 9
Synerduino STM F405A Hex INAV9.0.0 RC3 Hex 2025
Synerduino STM F405 Hex INAV9.0.0 RC3 Hex 2025
Synerduino STM F405 Hex INAV9.0.0 Hex 2026
Synerduino STM F405 Hex INAV9.0.1 Hex 2026
Synerduino STM F405 Hex INAV9.1.0 Hex 2026
Synerduino STM H743
Note :
SYNERDUINOSTM_H743 – IMU0 – SPI1
SYNERDUINOSTM_H743A – IMU0 – SPI2 / BlackBox – SPI1
INAV 7
Synerduino STM H743 Hex INAV 7.0.0.Hex
Synerduino STM H743A Hex INAV 7.0.0.Hex
Synerduino STM H743 Hex INAV 7.1.0.Hex
Synerduino STM H743A Hex INAV 7.1.0.Hex
Synerduino STM H743 Hex INAV 7.1.1.Hex
Synerduino STM H743A Hex INAV 7.1.1.Hex
Synerduino STM H743 Hex INAV 7.1.2.Hex
Synerduino STM H743A Hex INAV 7.1.2.Hex
Synerduino STM H743 Hex INAV 7.1.2-1.Hex 2025
Synerduino STM H743A Hex INAV 7.1.2-1.Hex 2025
INAV 8
Synerduino STM H743 Hex INAV 8.0.0.RC3 Hex
Synerduino STM H743A Hex INAV 8.0.0.RC3 Hex
Synerduino STM H743 Hex INAV 8.0.0 Hex
Synerduino STM H743A Hex INAV 8.0.0 Hex
Synerduino STM H743 Hex INAV 8.0.1 Hex
Synerduino STM H743A Hex INAV 8.0.1 Hex
Synerduino STM H743 Hex INAV 8.0.1 -1.Hex 2025
Synerduino STM H743A Hex INAV 8.0.1 -1.Hex 2025
INAV 9
Synerduino STM H743A Hex INAV 9.0.0 RC3 Hex
Synerduino STM H743 Hex INAV 9.0.0 RC3 Hex
Synerduino STM H743A Hex INAV 9.0.0 Hex
Synerduino STM H743 Hex INAV 9.0.0 Hex
Synerduino STM H743A Hex INAV 9.0.1 Hex
Synerduino STM H743 Hex INAV 9.0.1 Hex
Synerduino STM H743 Hex INAV 9.1.0 Hex
Synerduino STM H743A Hex INAV 9.1.0 Hex
Driver
PID Presets (INAV Configurator)
DIFF parameters for the Syenerduino drone(250mm frame ,4045/5045 Prop, 2500kv-2300kv motor)
Paste or save this on your CLI Tab and press Enter , Dont forget to change your Reciver Tab mapping , Modes Tab Flight modes with ARM , RTH , NAV POS , etc.
Synerduino STM DIFF 6.0.0 22-4-2023.txt
Synerduino STM DIFF 6.1.0 12-5-2024.txt
Synerduino STM DIFF 7.0.0 12-5-2024.txt
Synerduino STM DIFF 7.1.1 20-9-2024.txt
Synerduino STM DIFF 7.1.2 31-8-2025.txt
Synerduino STM DIFF 8.0.1 18-8-2025.txt
Misc. Software
Msys Terminal
Xpack requirment
(INAV 5 – 6) xpack-arm-none-eabi-gcc-10.2.1-1.1-win32-x64
(INAV 7 ) xpack-arm-none-eabi-gcc-10.3.1-2.2-win32-x64
(INAV 8-9) xpack-arm-none-eabi-gcc-13.2.1-1.1-win32-x64
VSCode-for scripting
Synerduino Target
Synerduino STM F411
INAV5
SynerduinoSTM-F411 Target 5.1.0
INAV6
SynerduinoSTM-F411 2 Target 6.0.0
SynerduinoSTM-F411 2 Target 6.1.0
INAV7
SynerduinoSTM-F411 Target 7.0.0
SynerduinoSTM-F411 Target 7.1.0
SynerduinoSTM-F411 Target 7.1.1
Synerduino-STM-F411 Target 7.1.2
INAV8-9
Synerduino-STM-F411 Target 8.0.0RC3
Synerduino-STM-F411 Target 8.0.0
Synerduino STM F405
INAV7
SynerduinoSTM-F405 Target 7.0.0
SynerduinoSTM-F405 Target 7.1.0
SynerduinoSTM-F405 Target 7.1.1
Synerduino-STM-F405 Target 7.1.2
INAV8-9
Synerduino-STM-F405 Target 8.0.0RC3
Synerduino-STM-F405 Target 8.0.0
Synerduino STM H743
INAV7
SynerduinoSTM-H743 Target 7.0.0
SynerduinoSTM-H743 Target 7.1.0
SynerduinoSTM-H743 Target 7.1.1
SynerduinoSTM-H743 Target 7.1.2
INAV8-9
Synerduino-STM_H743 Target 8.0.0RC3
Synerduino-STM_H743 Target 8.0.0
![]()
Documentation
Introduction Synerduino STM 2026
Preparation Synerduino STM 2026
Vehicle Ardupilot Synerduino STM 2026
GCS Documentation
Ardupilot Documentations for various vehicle types

Ground Station
Compatible Apps List
Note: More Documentation to follow soon.
Ardupilot Firmware Package
Contains all Vehicle types options
- ArduCopter
- Arduplane
- ArduHeli
- ArduRover
- ArduSub
- Blimp
- Antenna Tracker
Synerduino Bootloaders
Synerduino F405 NAVI.hex – Bootloader 7-2025
Synerduino F405.hex – Bootloader-8-2-2026
Synerduino H743.hex – Bootloader-8-2-2026
Synerduino Firmware
Synerduino F405-4.7.0.zip – Firmware 7-2025
Synerduino F405-4.7.0.zip – Firmware-8-2-2026
Synerduino H743-4.7.0.zip – Firmware 8-2-2026
Synerduino H743-4.7.0.zip – Firmware 15-2-2026
Synerduino 250mm Drone Parameters STMF405
this are presets sutable for 250mm size drone from Ardupilot default
Upload with Q Ground Control> Parameters > Tools
Synerduino-250mm-Arducopter-4.7.0.zip
Goto Parameters settings and Change Serial to this default
Default Serial Assignments Synerduino F405 Recommendation
- Serial1 – UART1 – Mavlink2 – Telem1
- Serial2 – UART2 – RCIN – SerialRC – Receiver goes here
- Serial3 – UART4 – GPS – Set Baud 57600
- Serial4 – UART6 – 0pen
Default Serial Assignments Synerduino H743 Recommendation
- Serial1 – UART1 – Mavlink2 – Telem1
- Serial2 – UART2 – Mavlink2 – Telem2
- Serial3 – UART3 – GPS – Set Baud 57600
- Serial4 – UART4 – GPS – Set Baud 57600
- Serial5 – UART6 – RCIN – SerialRC – Receiver goes here
- Serial6 – UART7 – 0pen
- Serial7 – UART8 – 0pen
- Serial4 – UART6 – 0pen
ADC Assignment
- ADC1 Voltage
- ADC2 Current
- ADC3 RSSI
- ADC4 Airspeed
Misc. files
Synerduino hwdef F405-4.7.0.zip 2025
Synerduino hwdef F405-4.7.0.zip 8-2-2026
Synerduino hwdef H743-4.7.0.zip 15-2-2026
AB-Bootloader
Synerduino AP_Bootloaders 8-2-2026
Synerduino STM adds a new Twist tothe Addon Integration . should you be adding external sensors and other Hardware to the board.
Note: if your packing more than two sensors or additional micro controllers on to your Drone we advice to use an ESC with a BEC or an External BEC to power those sensors : see SynerduinoSTM on power setup on the Documentation
Note: these are Provided as samples for users to implement their own hardware.
Programming Documentation

Hardware Implementation
Computer Vision
Yolov5 SynerYolov5 Lane Detection 2023.zip
Yolov5 SynerYolov5 Lane Detection 2026.zip
Computer Vision OpenCV
ArduBlock Implementation
this is use with Arduino IDE 1.14-1.18 Version useful when working with arduino codes file extention.abp
Power Implementation
need more power ? Synerduino Drone Powersupply and Distribution should allow for expanded capacity

 |
Synerduino STMF411 |
 |
Synerduino STMF405 |
 |
Synerduino STMH743 |
 |
250mm Synerduino Kwad |
|
Programmable Logic |
Multirotor
Surface
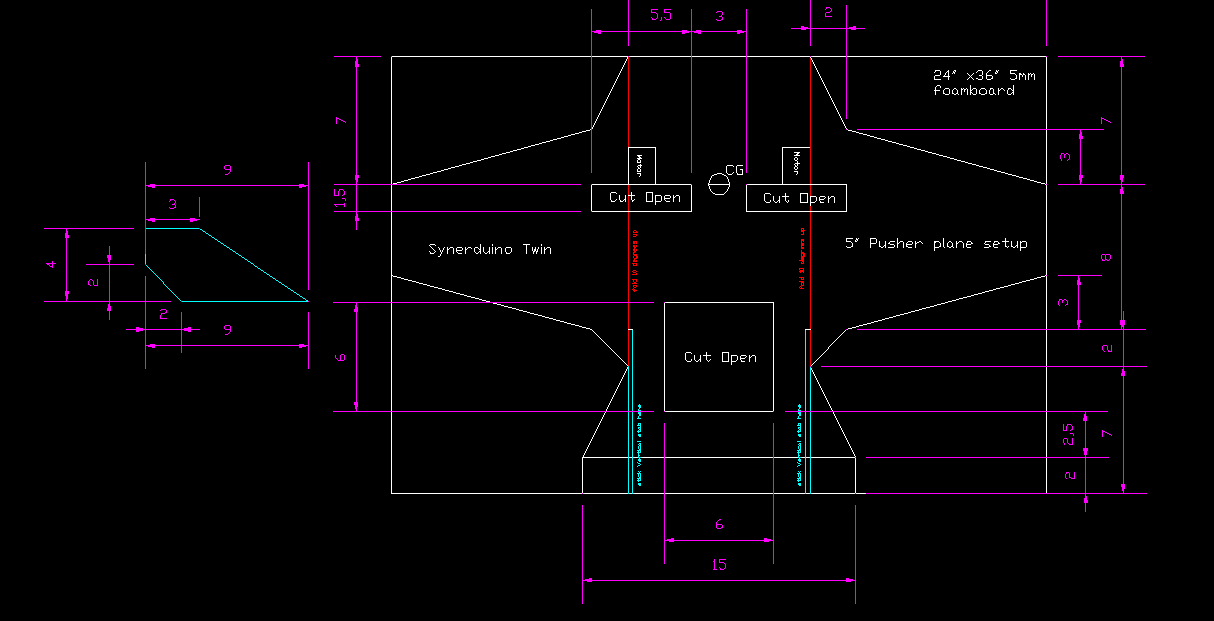
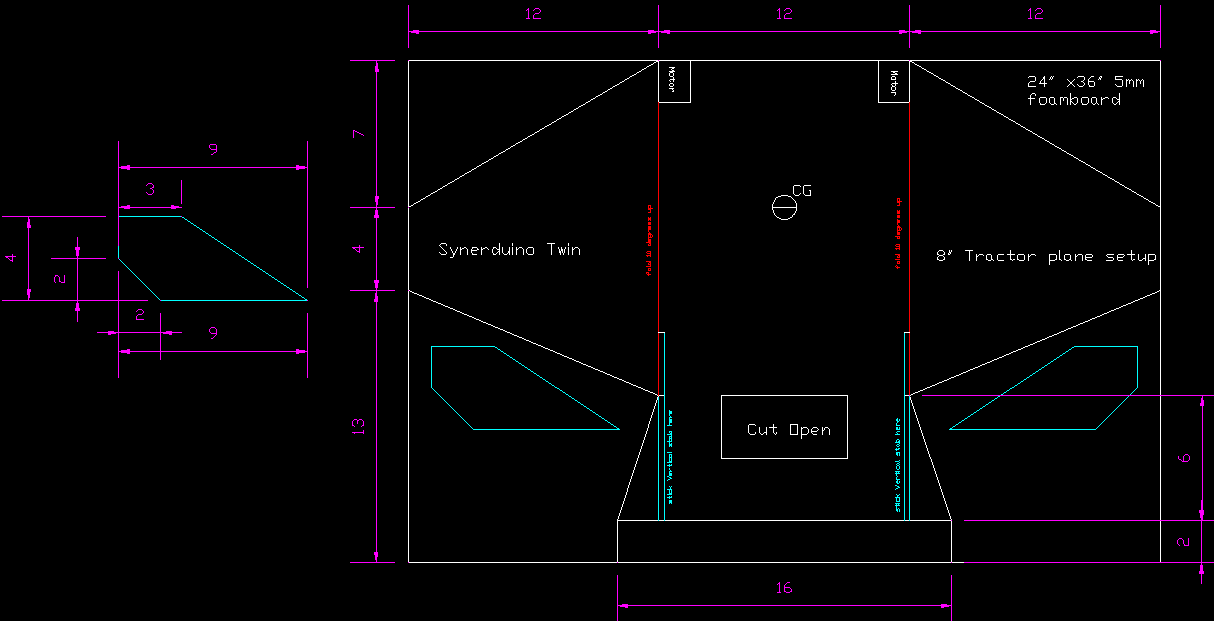
Fixwing
Fixwing
Fail Safe
3D Printed files
pls check the stl file and the printer settings prior to print
PLA
Layer 0.15
Shell 1.2
Print speed 90-100
Print Temp 205c
Bed Temp 55
ABS
Layer 0.15
Shell 1.2
Print speed 50-60
Print Temp 245c
Bed Temp 95
Phone Holder

FS-XB8 Enclosure

Quadcopter
Tricopter frame

this 300mm drone requires an MG996R Servo at the tail and uses the round servo horn to mount the tail motor mount and at least one ESC with UBEC of 2A to support the servo power requirment
FPV frame Adaptor

allows synerduino to fits to most frames with mounting holes of 30.5×30.5mm, 20x20mm, and 25.5×25.5mm

Adapter 7 supports Synerflight enclosure
Airplane



Boat

Set Compatible with the yellow 120 motor TT Gearbox with 65mm wheel set
Synerduino Paddle wheel Boat

Synerduino Rover

IMU Sensor box for Synerduino board

Mag sensor box for Rideon Toy

LIDAR TF Mini Housing

For Beginners who wish to learn how to fly a Drone we can recommend this link

https://www.realdronesimulator.com
Trainer cord PPM
Require a Game Controller or a Radio Transmitter with PPM Trainer cord or USB dongle this Virtual Port comes useful
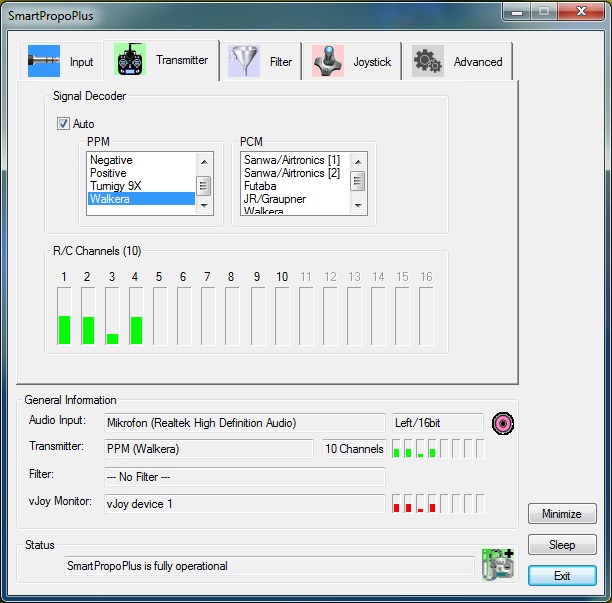
This application uses PL jack to your computer Aux Mic input
The Shield Kit includes the following items:
- 1x Synerduino STM Shield Board
- 1x STM32 board
- 1x Bluetooth
- 2x JR Servo Plug
- 2x DUPONT Line (V0.1)
- 1x Pair XT60
List of features:
- Compatible with INAV Firmware
- Ground Station with INAV configurator
- Windows , Linux , Android Apps
- IMU 10DOF
- Supports 3S/4S Batteries
- 4 Output ESC Pads
- ADC Pins
- PWM output