How Can We Help?
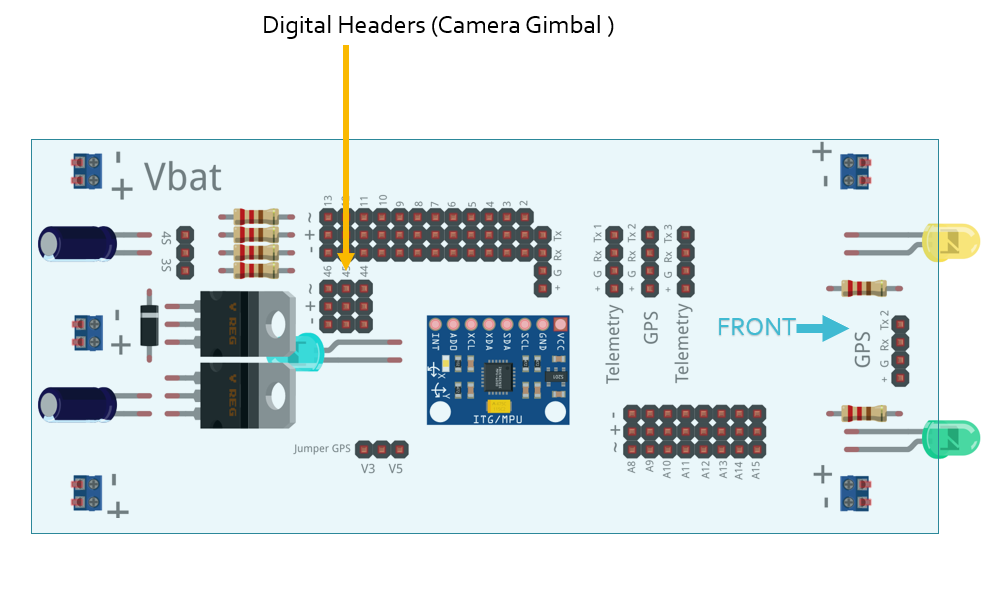
Camera Gimbals and Trigger
this is useful for stabilization and triggering requirements on Vehicle payload and its incorporated in the firmware
CONFIG.H – Cam Stabilisation
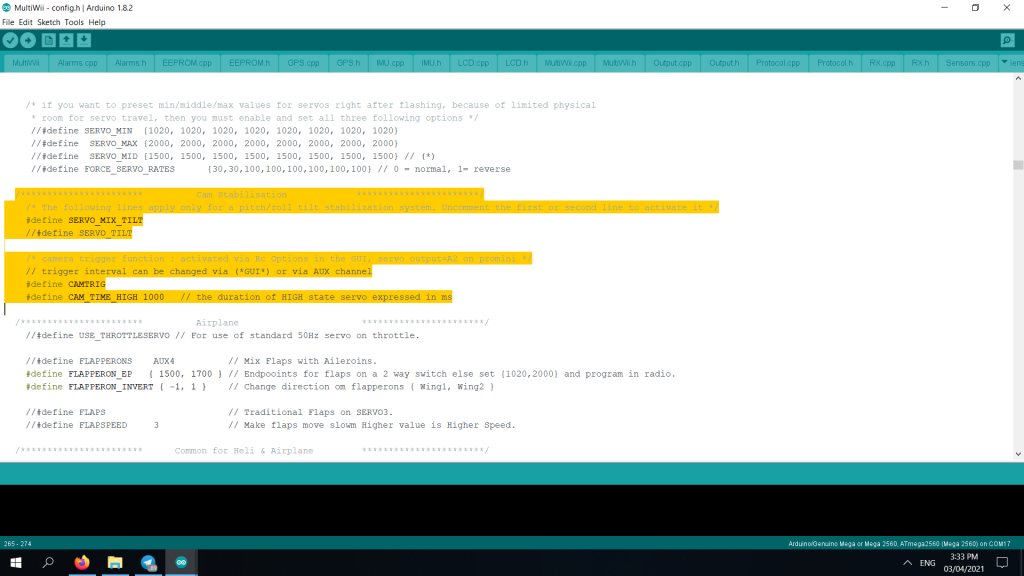
Uncomment to use camera gimbal function
- #define SERVO_MIX_TILT //D44 and D45 (120 Mix)
- #define SERVO_TILT // D44 (Pitch), D45 (Roll)
- #define CAMTRIG // Activate function D46 Trigger PWM
- #define CAM_TIME_HIGH 1000 // time the servo stays in HIGH state expressed in ms
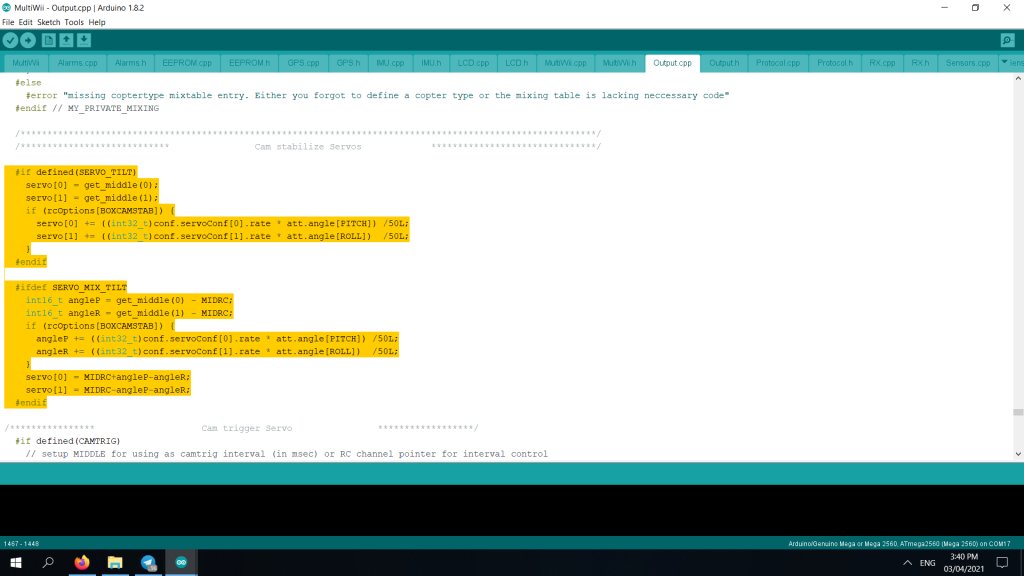
OUTPUT.CPP – Changing the Value + / – changes the direction of the servo

Cam stabilize Servos
Change for Forward Line
servo[0] += ((int32_t)conf.servoConf[0].rate * att.angle[PITCH]) /50L;
servo[1] += ((int32_t)conf.servoConf[1].rate * att.angle[ROLL]) /50L;
Change for Reverse Line
servo[0] -= ((int32_t)conf.servoConf[0].rate * att.angle[PITCH]) /50L;
servo[1] -= ((int32_t)conf.servoConf[1].rate * att.angle[ROLL]) /50L;
This controls the movement of the rate servo You can change the value as adjust to horizontal state
*att.angle[PITCH]) /50L
Cam trigger Servo

ctLow = constrain((rcData[CAM_TIME_LOW]-1000)/4, 30, 250); // time the servo stays in its low State expressed in ms
servo[2] = (servo[2]-1500)*SERVODIR(2,1)+1500; // the PWM Trigger Position in High State and in Low State
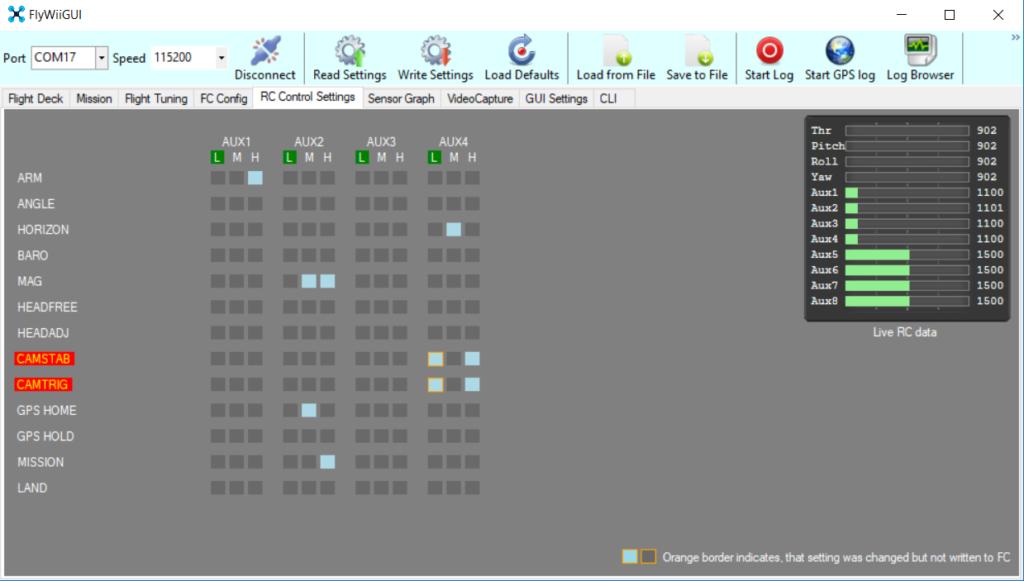
Flywii GUI -RC Control Settings