
How Can We Help?
Synerduino Airplane Setup
To update on the Recent successful mission flight of the Synerduino plane this documentation is made for those who wish to build their own ,
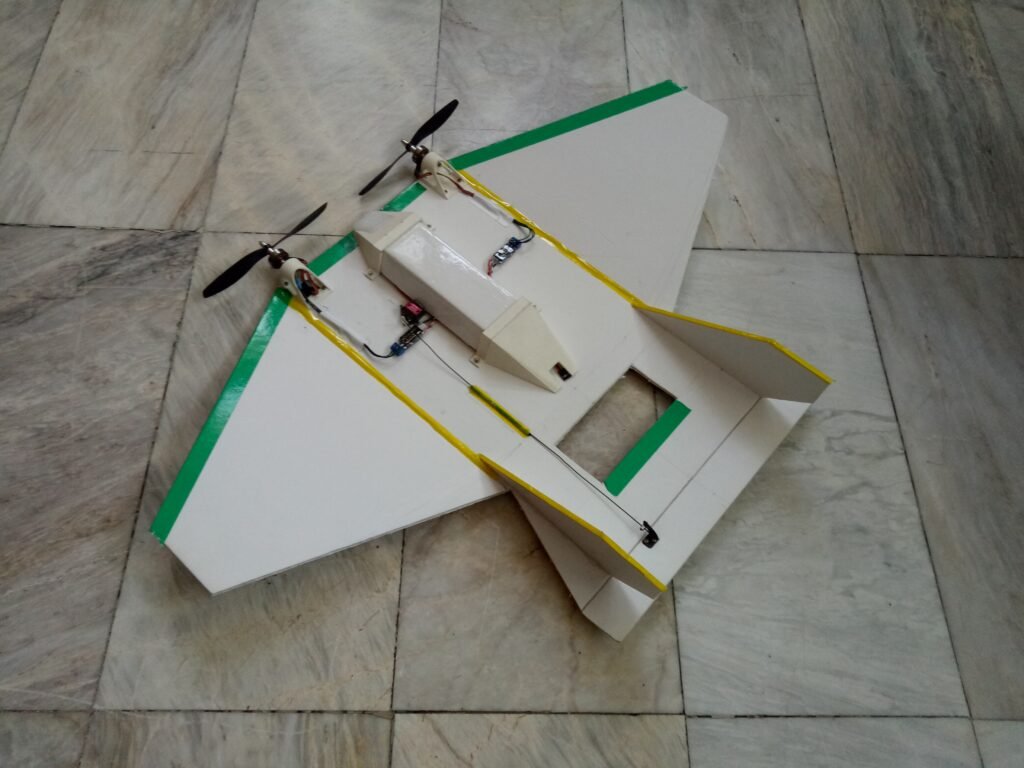
Synerduino Dart
this is base off the FT Flyer/Dart with differential thrust single elevator setup with 3 different power setup to make things flexible Dimension are in Inches cut from a 24″x36″ foamboard
Setup

This drawing can also be configure for a Prop in slot design pusher configuration this well protects the prop from damage hard landings

Wing Dihedral
This is folded roughly 10 degrees up to give it roll stability
Setup A 3s
- 2x 1300kv-1500kv motor
- 2x 30A ESCs
- 500mah-800mah 3s
- 1x 9g MG Servo
- 2x 8045 2 bladed prop
Setup B 2s
- 2x 2300kv – 2500kv motor (1806-2205)
- 2x 30A ESC
- 500mah – 800mah 2s
- 1x 9g MG Servo
- 2x 8045 2 bladed prop
Setup C 3s
- 2x 2300kv – 2500kv motor (1806-2205)
- 2x 30A ESC500mah – 800mah 3s
- 1x 9g MG Servo
- 2x 5045 3 bladed prop
3d Print
Synerduino Arduino
use the Xloader to upload the Hexfile to the Arduino mega
Synerduino Special airplane .ino
Parameters PID
- (FlyWiiGUI) Accelerometer Calibration the plane is Attitude Angle is roughly 40 degrees nose up this provides a Sufficient Angle of Attack to a flat Wing
- (FlywiiGUI) Navigation setting allow Banking degree to be set anywhere from 15 degree -30 degree depending on how aggressive an airplane should control its pitch and roll moment (recommend 15 degrees for starters) this limits the pitch movement from the default 45 degree the attitude is calibrated to
- Launch at a 45 degree angle (the plane is design as a slow flyer and would naturally hold that attitude in the air