
How Can We Help?
Synerduino STM
Synerduino is an STM32 bit compatible shield develop to run the INAV system , this adds a new dimention to the Synerduino lineup intended for Advance users
Hardware
Hardware Features
- SPI and I2C Pins
- External OSD implemntation
- small prototyping section
- inverted and uninverted RC2 SBUS pins
- 7 PWM output
- 2 UART
- 1 Soft UART
- External sensor option
- Prototyping shield compatible
Hardware Specs
Sensors STM (GY91)
- Gyroscope + Accelerometer: MPU9250 in SPI mode
- Magnetometer: AK8963
- Barometer: BMP280
- GPS Setup – UBLOX Protocol (As Preset in Firmware Hex file )
Power
- Input Voltage from Arduino Board: 3.3-5V
- PWM Power Rail Regulated – 5V at 1.5A
- Drone Power Input Voltage – 12.6V (3S) or 16.8V (4S)
- Power Distribution Lines – 80A
Dimensions: 128 x 62 x 28 mm LWH / (V1.1)135mm x 62mm x 28mm
Weight: 46.1g
4 Solder Pads for 4 ESCs and Motors
Software
Software Feature
- INAV Supported Firmware
- Programmable Logic Control
- Missions
- LED control
- updated fixwing model
Downloadable
Firmware Hex
Hex file contains the Firmware to be flash in DFU mode of the Controller , see to it the version matches the INAV GCS version
Synerduino STM F411
Syneduino STM Hex firmware and Synerdino STM2 replaces the beeper pin for RSSI to utilize 3 ADC total input
Synerduino STM F405
Synerduino STM H743
PID Presets
This is the Default Synerduino STM (250mm frame ,4045 Prop, 2500kv-2300kv motor)
Copy this and Paste it on the INAV Configurator CLI Tab Terminal and press Enter , Save Settings and Reboot
Note : RC mapping ,Compass calibration and Port Mapping are still required after setting this up
Updated
Drivers
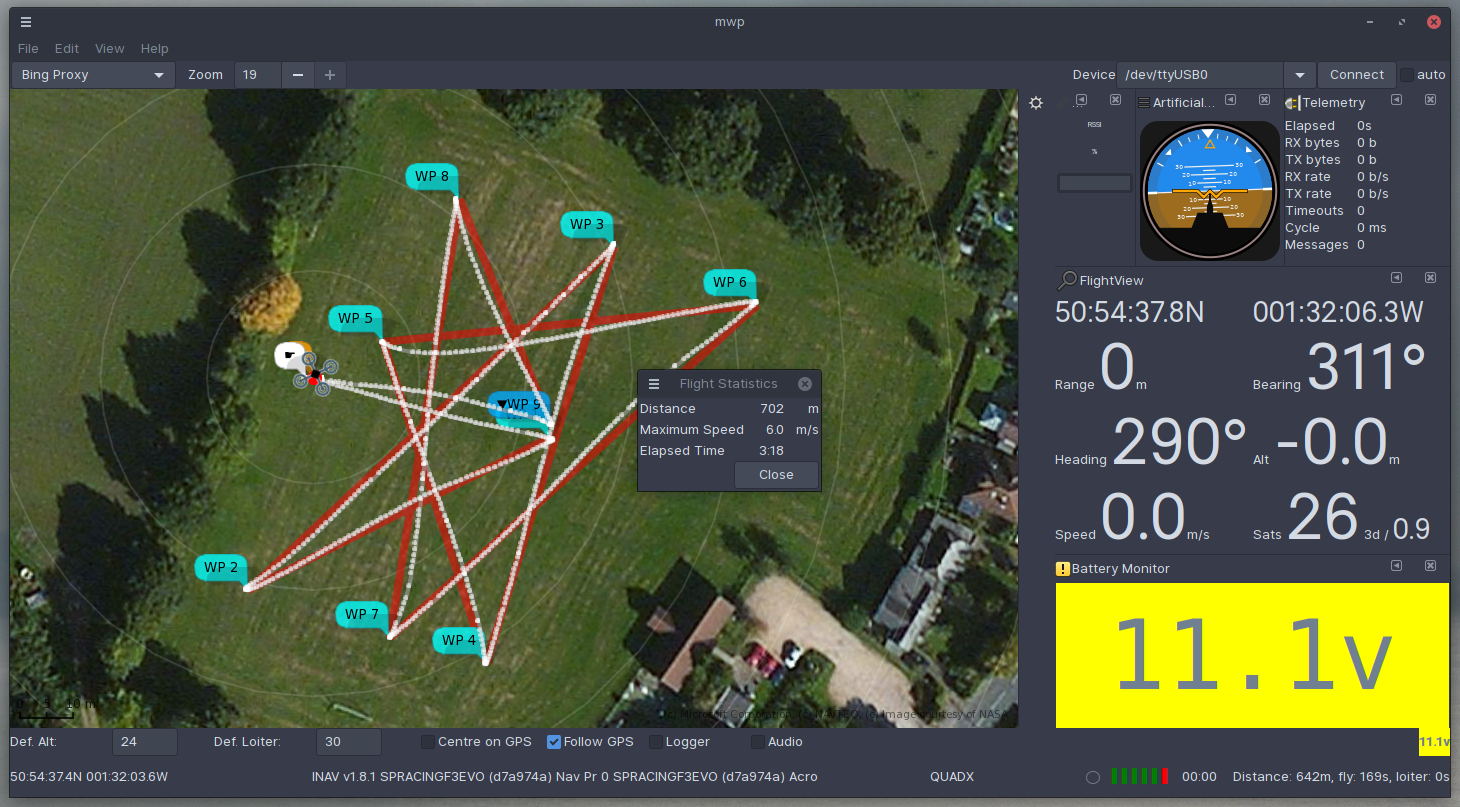
Ground Station
Windows
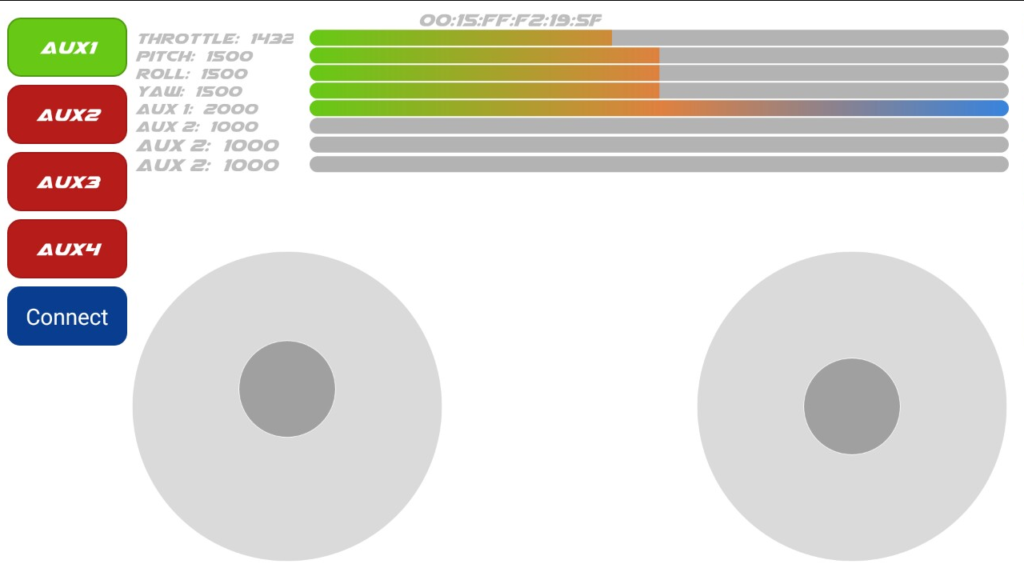
Android
Hermes 1.0.zip (AETR)Flone Remote 1.0.zip (AETR)
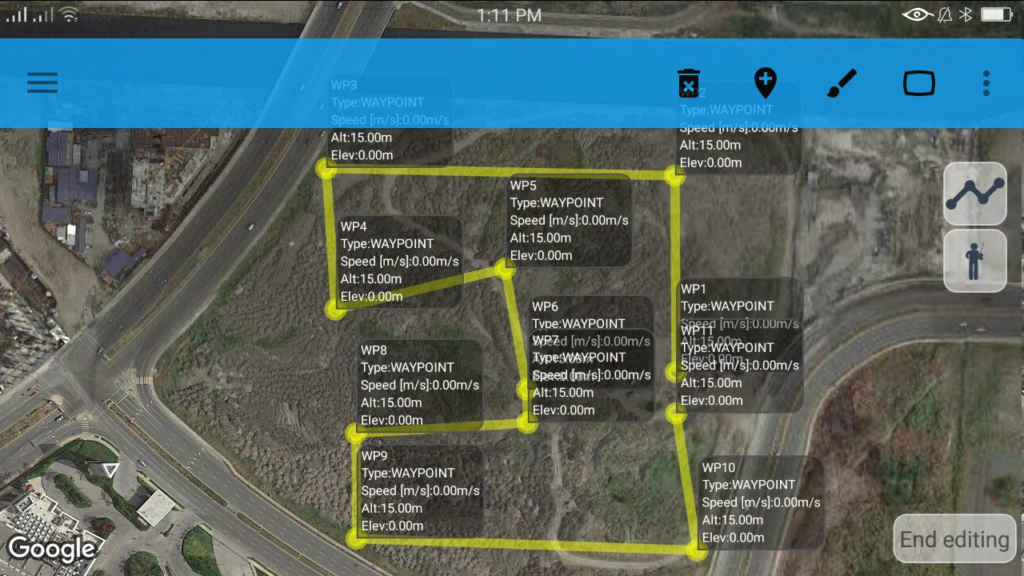
Android Mission Planning APK
Mission Planner for INAV 1.43 pro.zip
Linux
Misc. Software
Msys Terminal
Xpack requirment
xpack-arm-none-eabi-gcc-10.2.1-1.1-win32-x64
VSCode-for scripting
Synerduino Target
SynerduinoSTM F411
SynerduinoSTM F405
SynerduinoSTM H743
GPS Documentation
http://synerflight.com/kwad-documentation/gps-configuration/