How Can We Help?
Ardupilot Vehicle types
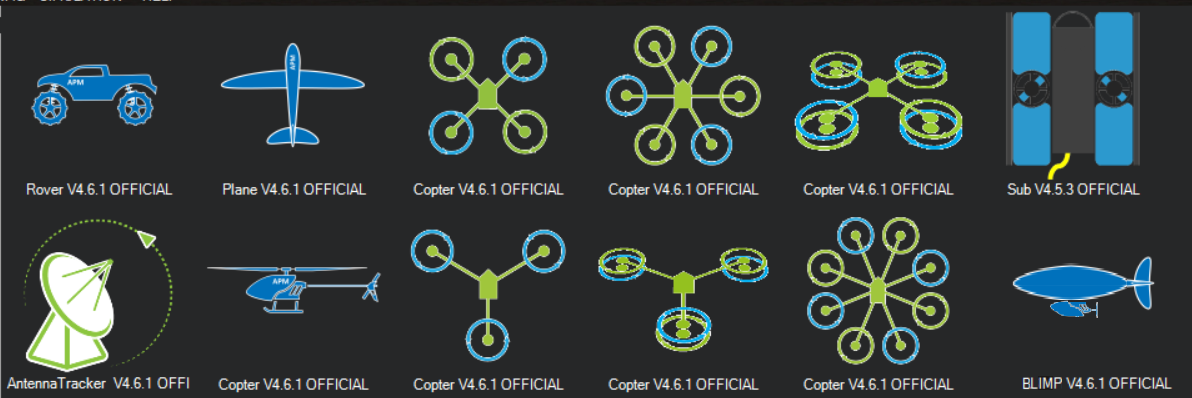
Vehicle Types
see each documentations
- ArduCopter Documentation
- ArduPlane Documentation
- ArduRover Documentation
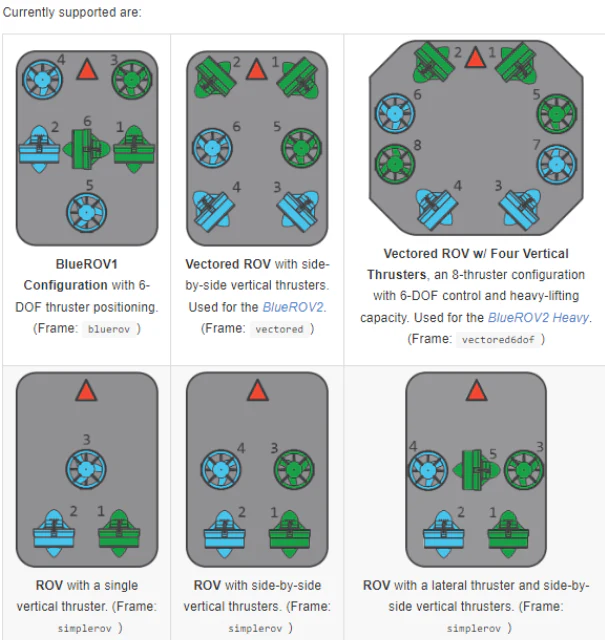
- ArduSub Documentation
- ArduBlimp Documentation
- Antenna Tracker Documentation
Motor/Servo Assignments
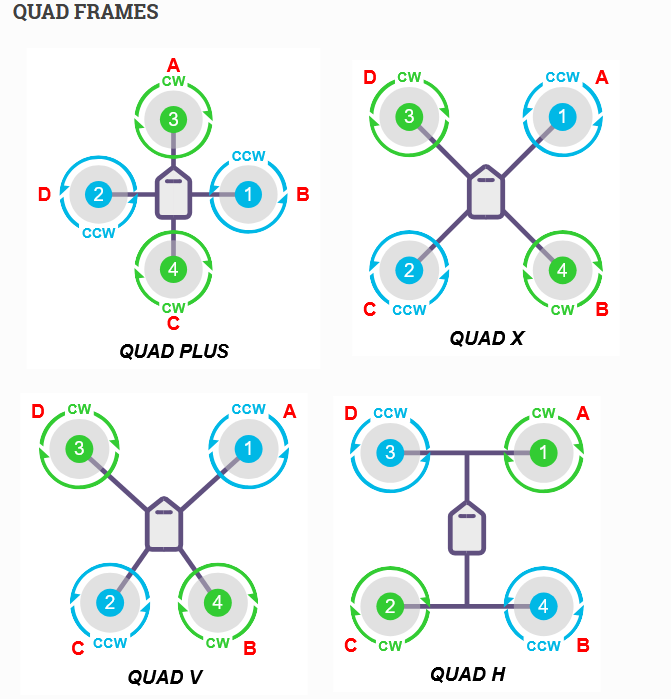
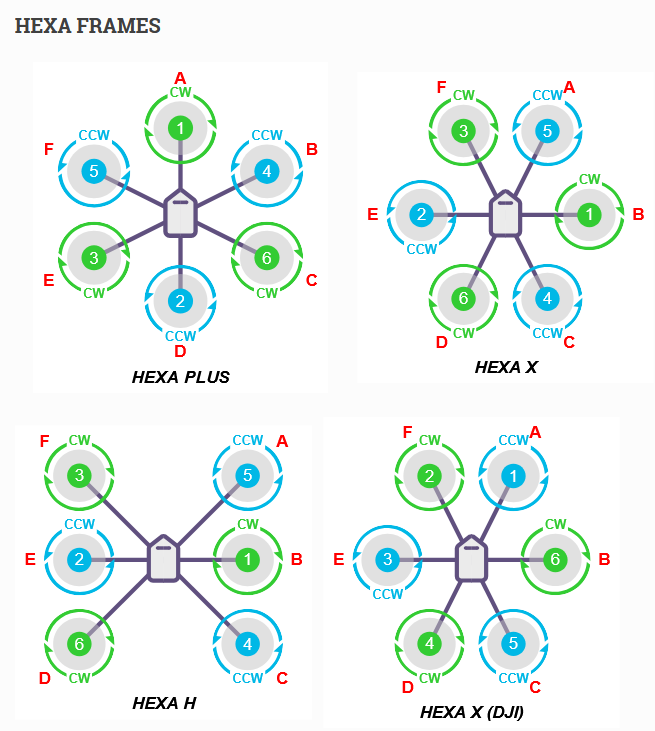
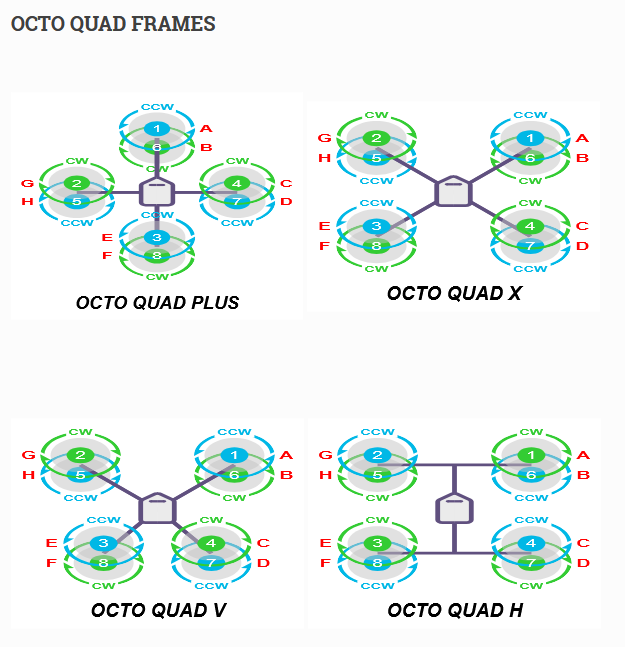
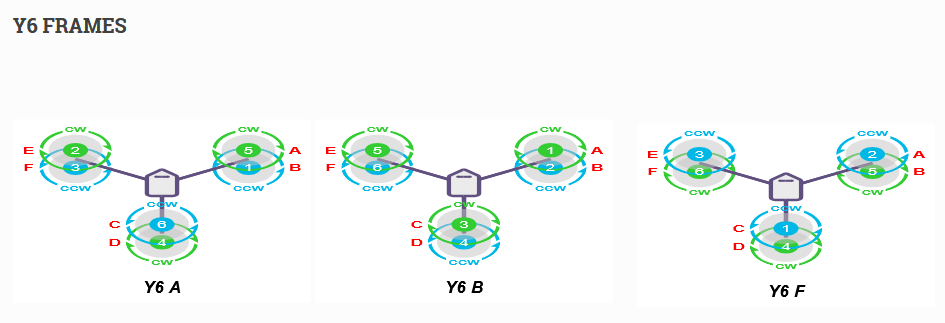
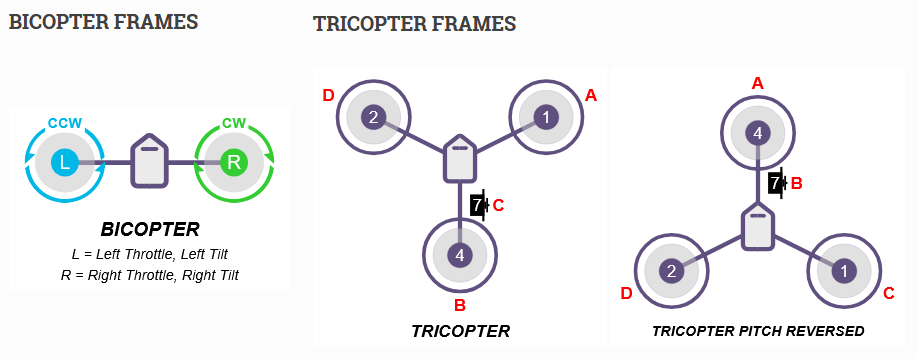
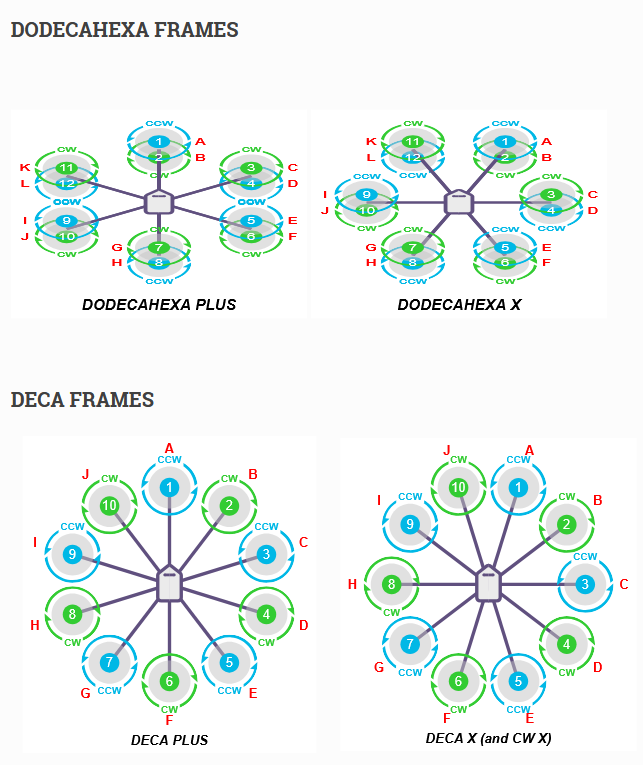
Arducopter

Arduplane

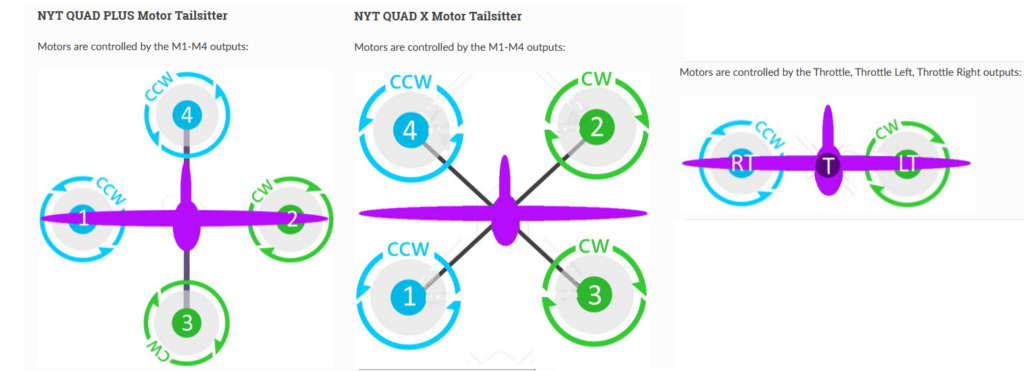
Tailsitter
ArduRover
rover-motor-and-servo-connections
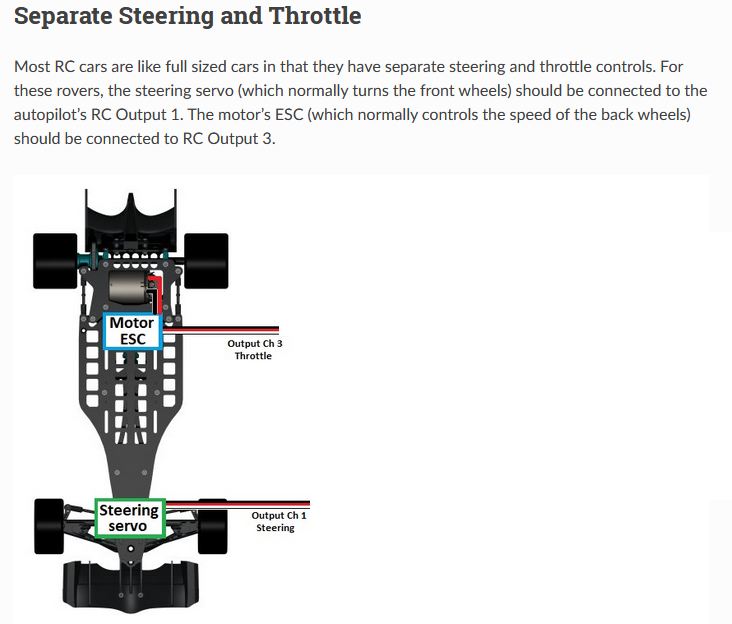
For this setup these parameters values should be set (they should actually be set by default). More details can be found on the Motor and Servo Configuration page.
- SERVO1_FUNCTION = 26 (Ground Steering)
- SERVO3_FUNCTION = 70 (Throttle)
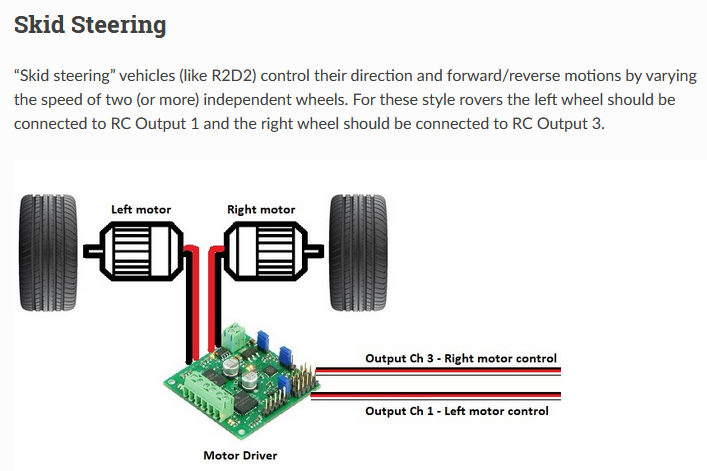
For this setup these parameters values will need to be set. More details can be found on the Motor and Servo Configuration page.
- SERVO1_FUNCTION = 73 (Throttle Left)
- SERVO3_FUNCTION = 74 (Throttle Right)
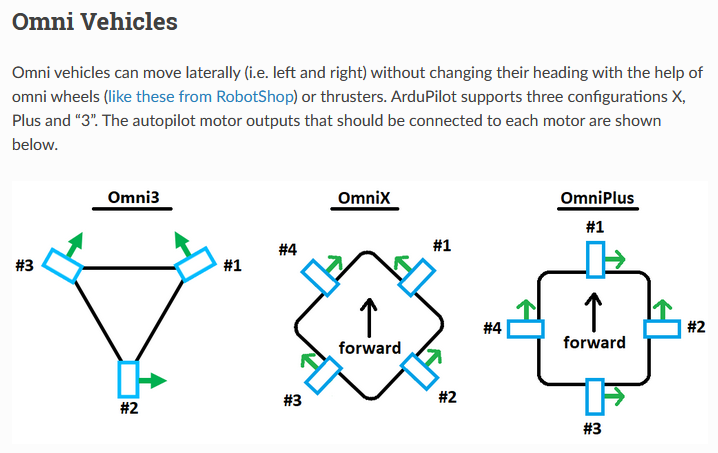
For this setup these parameters values will need to be set
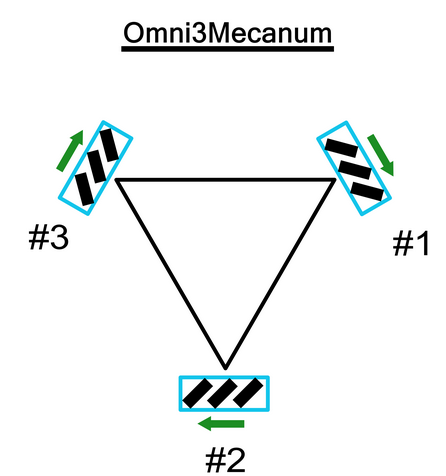
- FRAME_TYPE = 1 (Omni3), 2 (OmniX), 3 (OmniPlus) or 4 (Omni3Mecanum)
- SERVO1_FUNCTION = 33 (motor1)
- SERVO2_FUNCTION = 34 (motor2)
- SERVO3_FUNCTION = 35 (motor3)
- SERVO4_FUNCTION = 36 (motor4)
ArduSub
https://www.ardusub.com/quick-start/installing-ardusub.html#completing-calibrations