How Can We Help?
Q Ground Synerduino Quick Setup
INTRO
Q ground Control one of several Ground station options compatible with Ardupilot it has a clean refine design across its OS platforms making it easy to use and setup of your drone.

Quick over view
Here you have an option of setting up the Vehicle or the Application
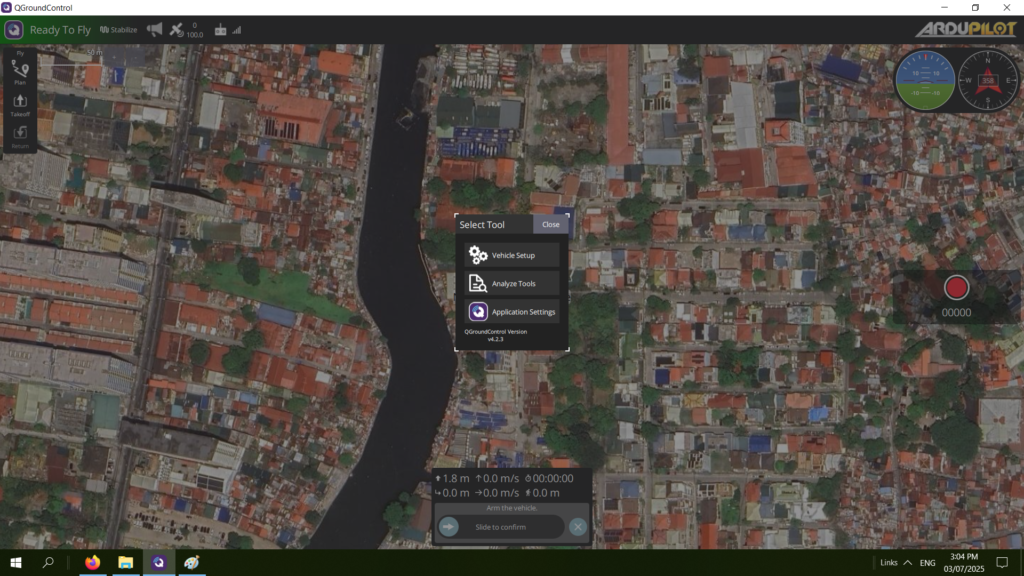
Vehicle setup
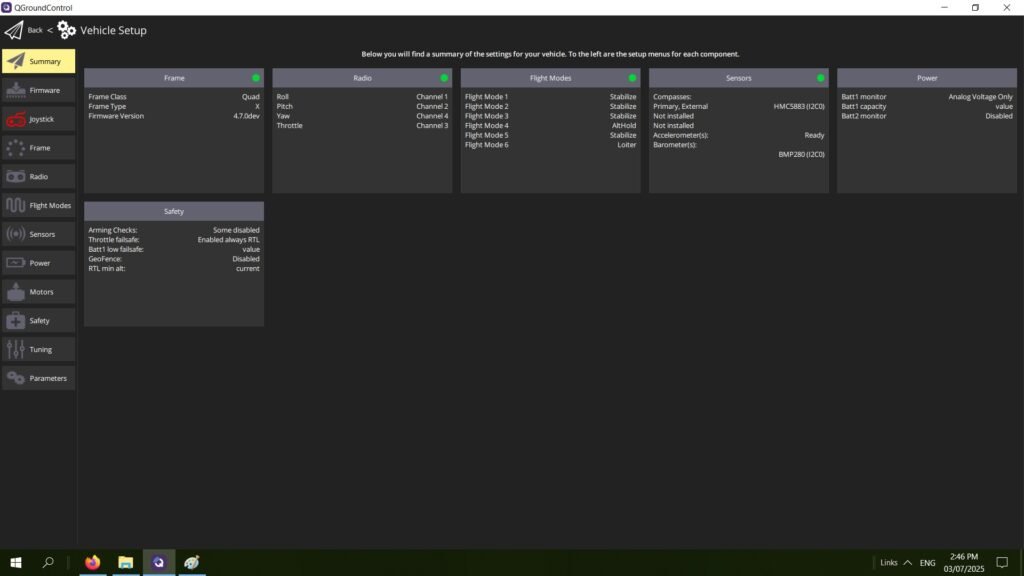
Summary
this is where the status of the Vehicle is presented
Firmware
Here you would first put the board on DFU mode by Pushing the Boot while plugging in the Synerduino board then select Ardupilot and Custom firmware. look for the .bin or .apj file
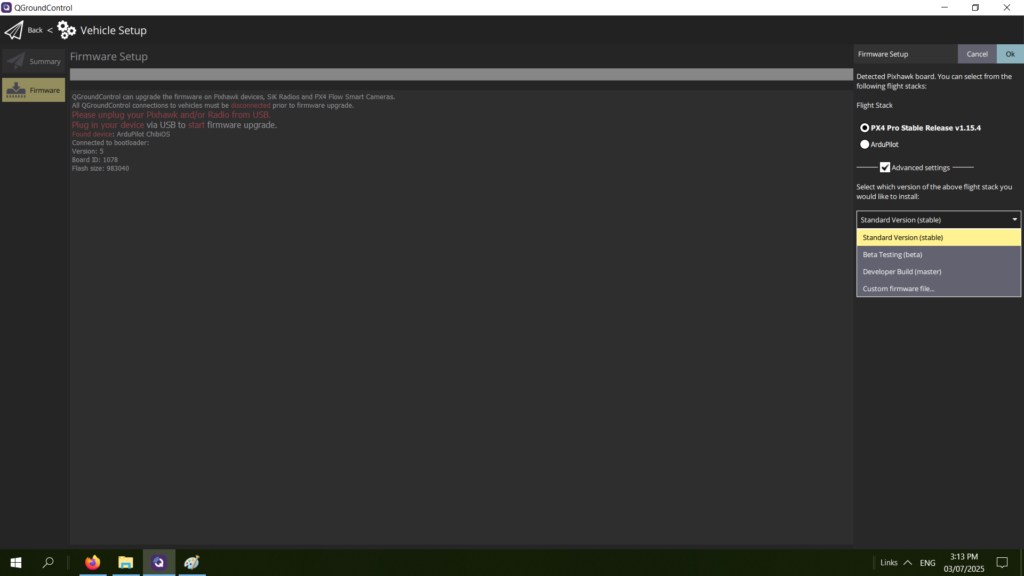
Note: Synerduino Ardupilot firmware can also be flash using INAV configurator .HEX see: INAV Documentation firmware flash.
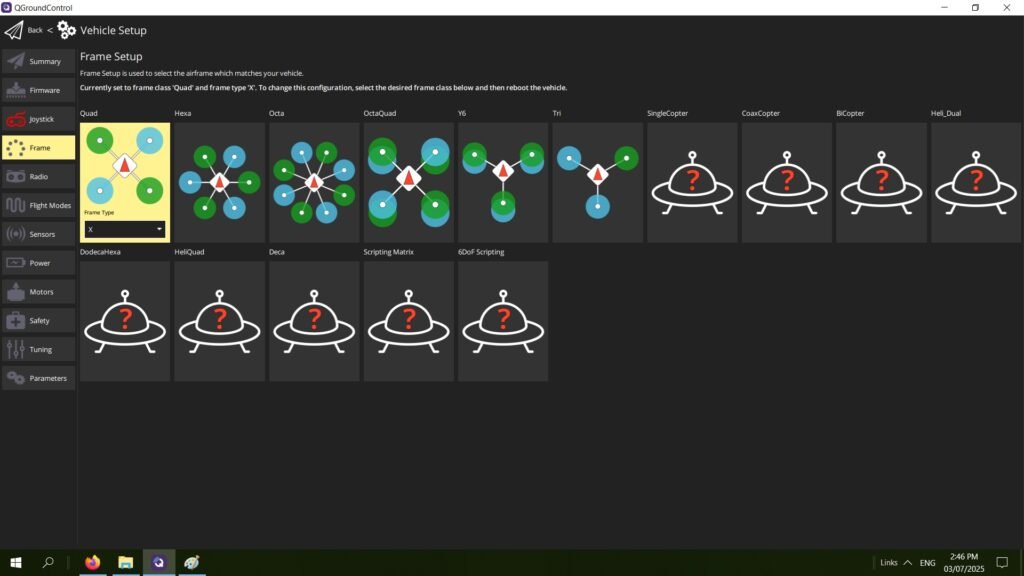
Frame
Synerduino uses Quad X. Be aware of the motor Orientation Pin assignment
See: documentation ArduCopter Documentation
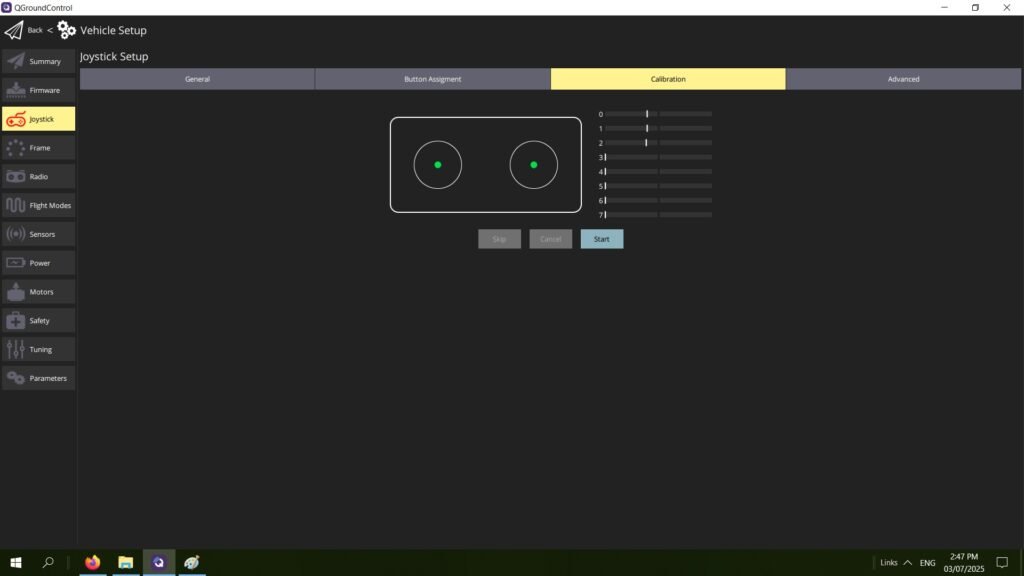
Joystick
This allows USB joystick to operate injunction with the GCS and what ever your means to communicate to the drone
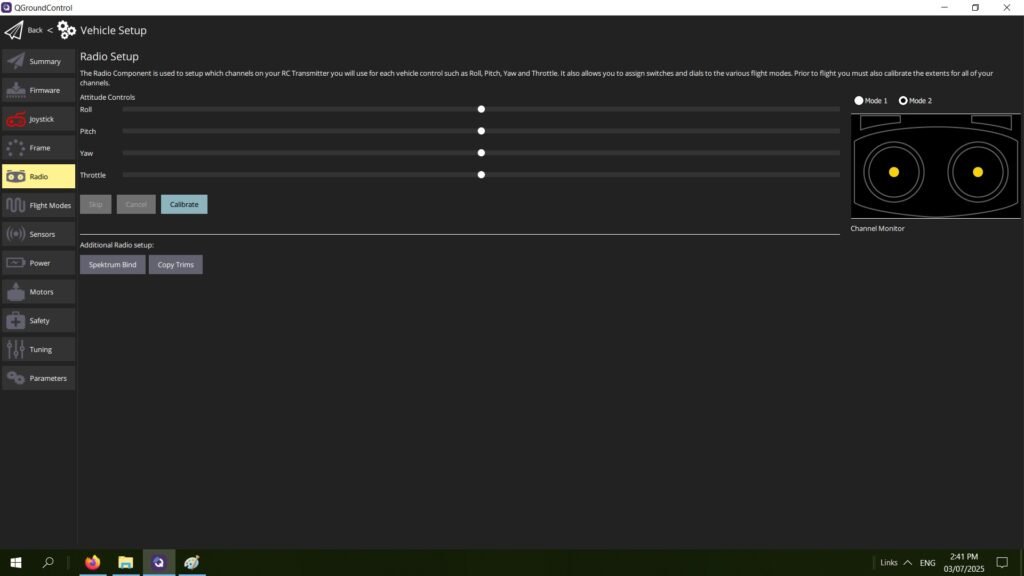
Radio
RC mapping and calibration of your main and Aux channels
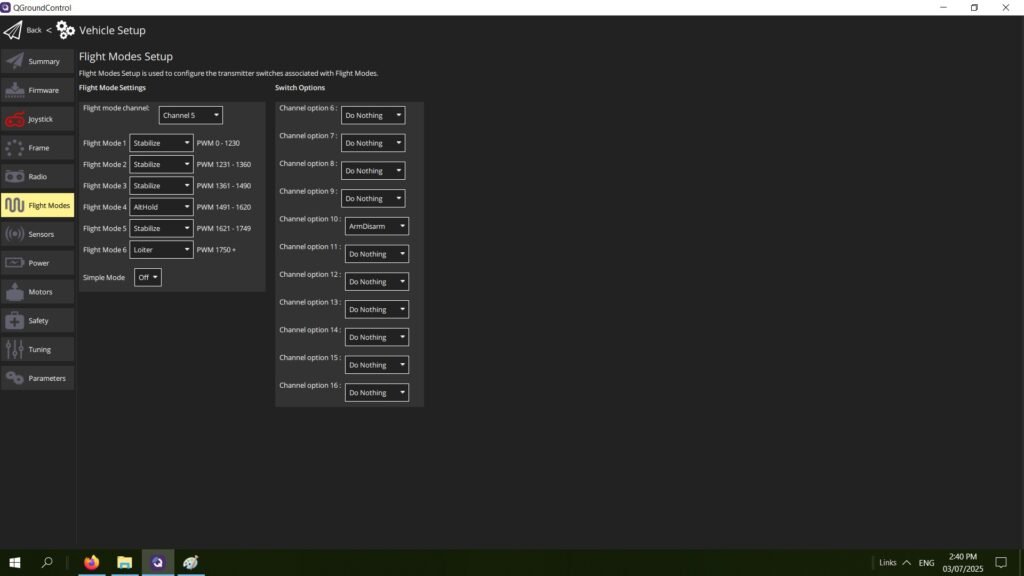
Flight Modes
Here you setup your modes assign to your Aux channels Switches
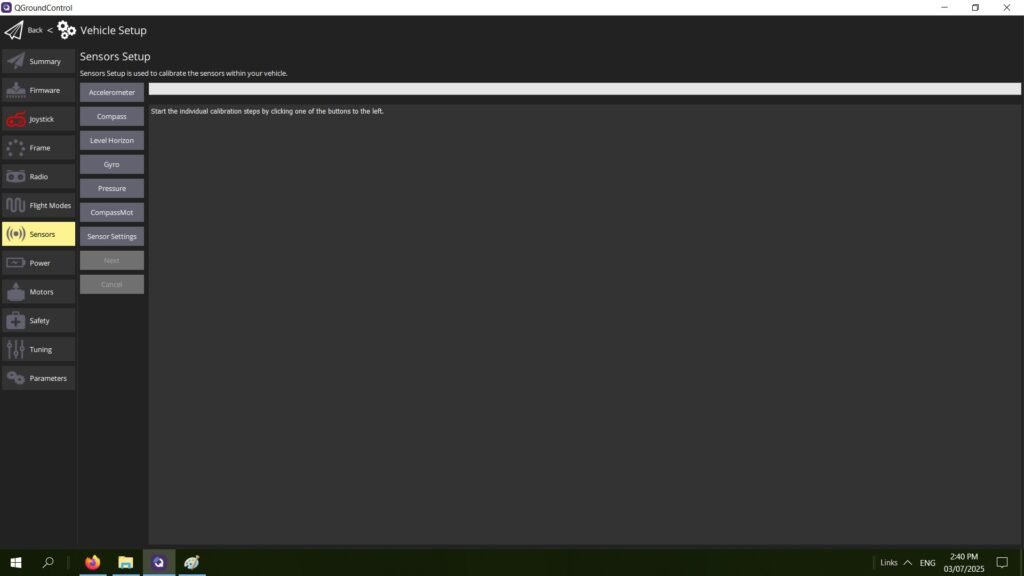
Sensors
IMU setup and Calibrations , you need to follow the instruction on how to orientate your drones to calibrate it and require Reboot .
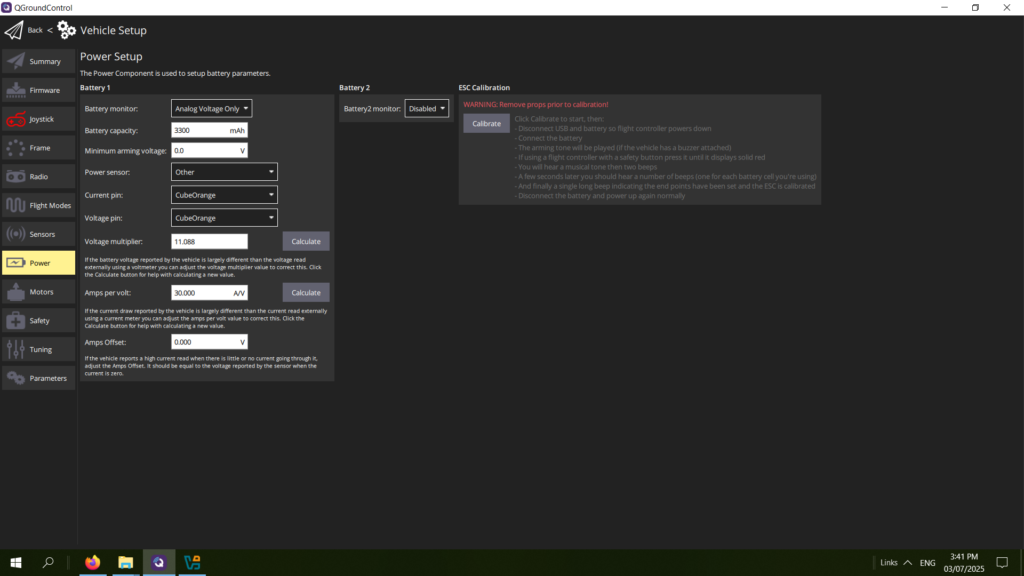
Power
setup your power management parameters
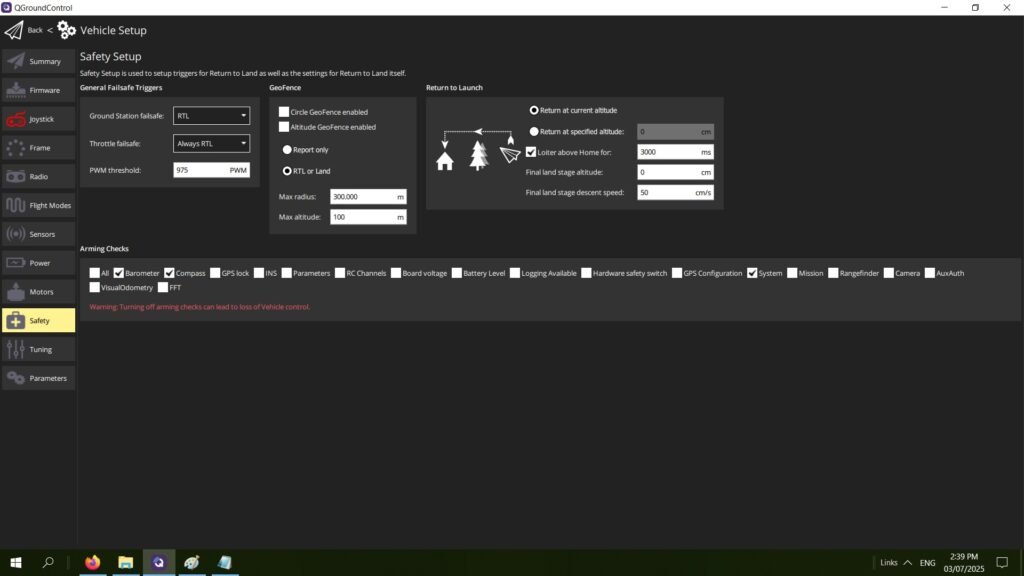
Safety
This setup the failsafe mode what the drone would do if it gets disconnected from RC or Telemetry
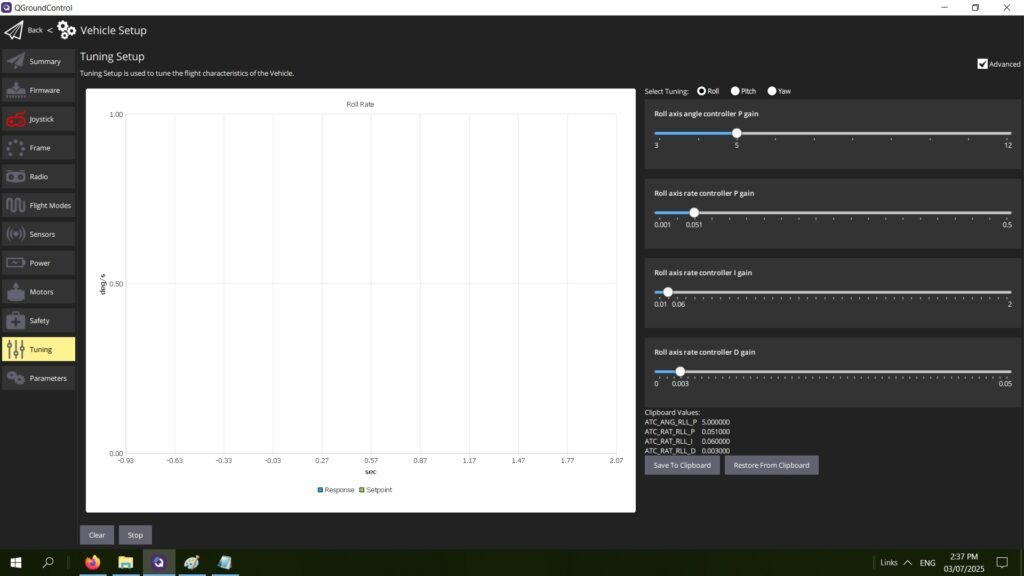
Tuning
this is where you Tune your PIDS and stability of the drone . Select Advance and set the PIDS from here
Synerduino 250mm Drone PID setting
Roll
ATC_ANG_RLL_P 5.000000
ATC_RAT_RLL_P 0.051000
ATC_RAT_RLL_I 0.060000
ATC_RAT_RLL_D 0.003000
Pitch
ATC_ANG_PIT_P 5.000000
ATC_RAT_PIT_P 0.051000
ATC_RAT_PIT_I 0.060000
ATC_RAT_PIT_D 0.003000
Yaw
ATC_ANG_YAW_P 4.500000
ATC_RAT_RLL_P 0.180000
ATC_RAT_RLL_I 0.018000
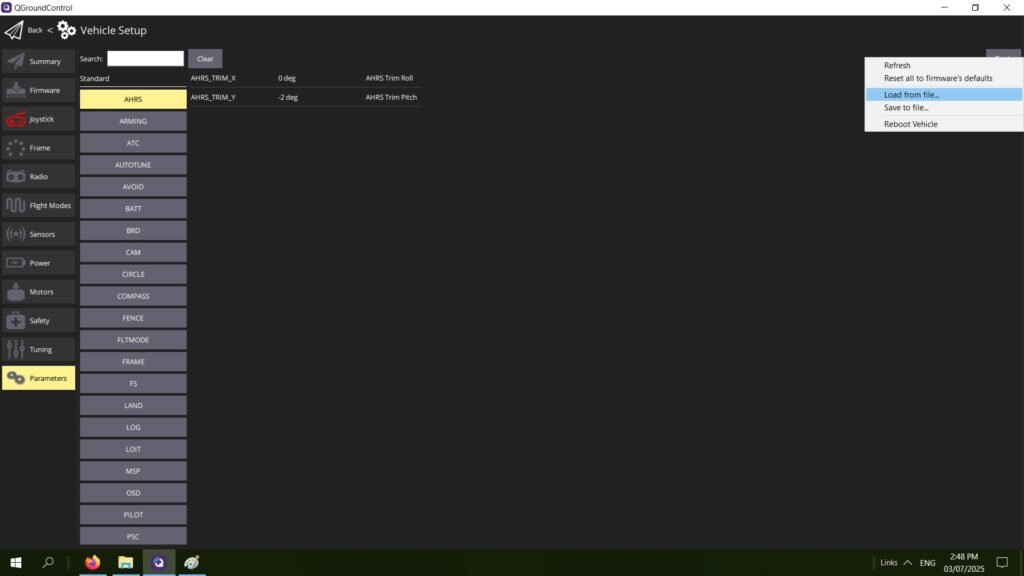
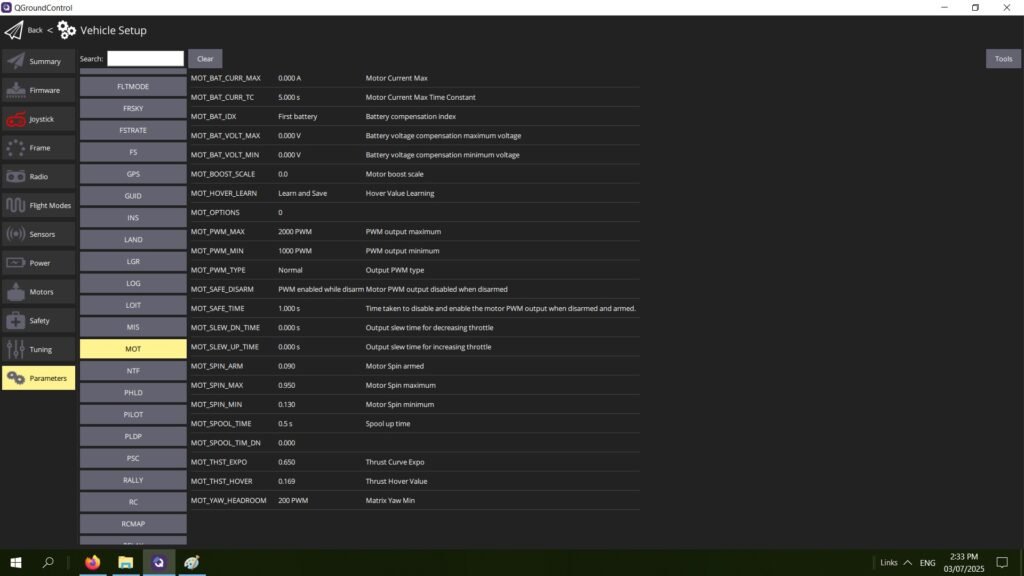
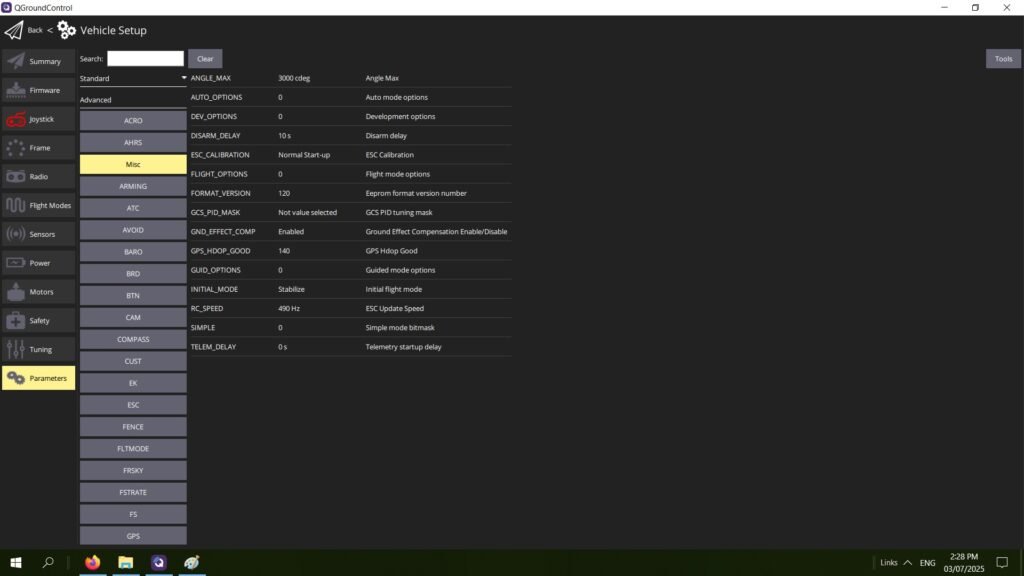
Parameters
Synerduino 250mm F405 Drone has a downloadable preset of parameter files Synerduino-250mm-Arducopter-4.7.0.zip
Synerduino 250mm drone because of its small size can have some unusual Behavior that is different from default we are going to run over a few of them
PILOT_SPEED_UP 50 CM/S – this controls the climb rate of the drone .
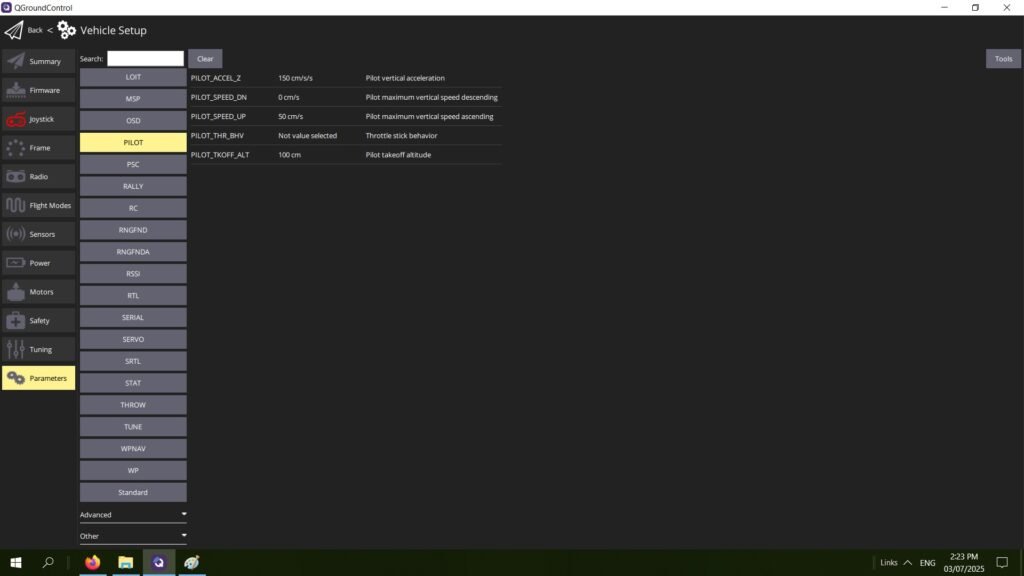
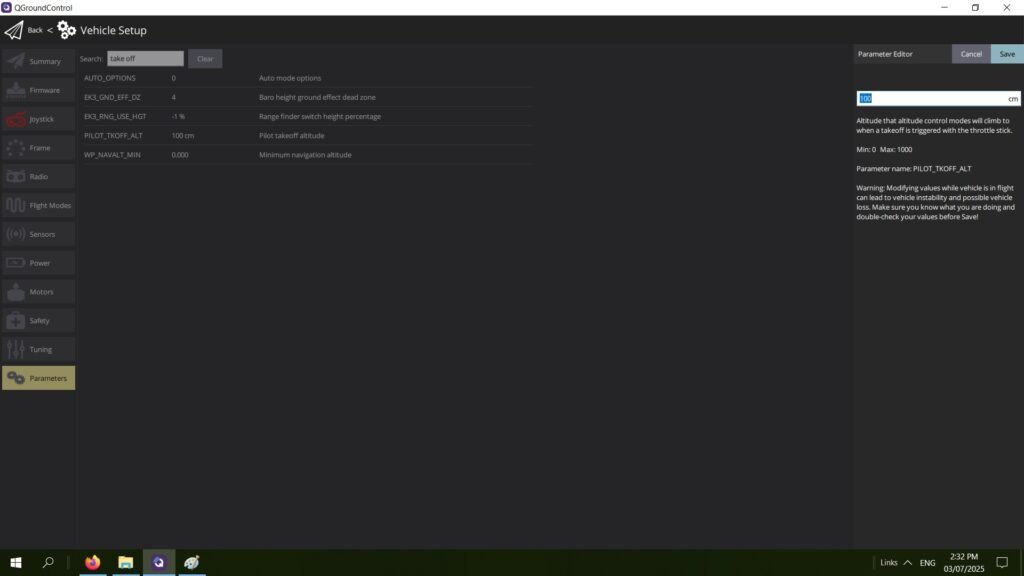
PILOT_TKOFF_ALT set to 100cm – this is the Altitude the drone would climb to when auto take off is selected. or in the start of the mission by default
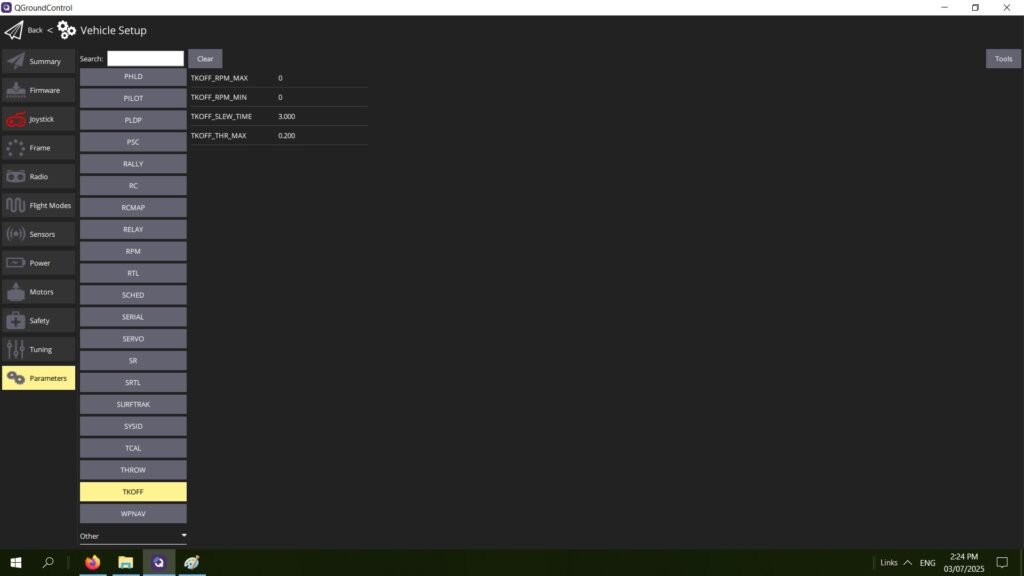
TKOFF_SLEW_TIME 3.000 – 3 seconds allow the motor to spool up after arm then take off. this is set to 5 Seconds for Large drones as it takes longer to get the Motors at Idle speed
TKOFF_THR_MAX – 0.200 Synerduino 250 is light so alittle throttle is require to take off Maximum throttle engage . this jumps the drone to the determine take off altitude . larger drone may require 0.400
EK3_GND_EFF_DZ 4 – small drones are affected by ground effect so allowance of a dead zone allow the barometer to adjust and compensate sometimes jumping the copter on takeoff to clear it.
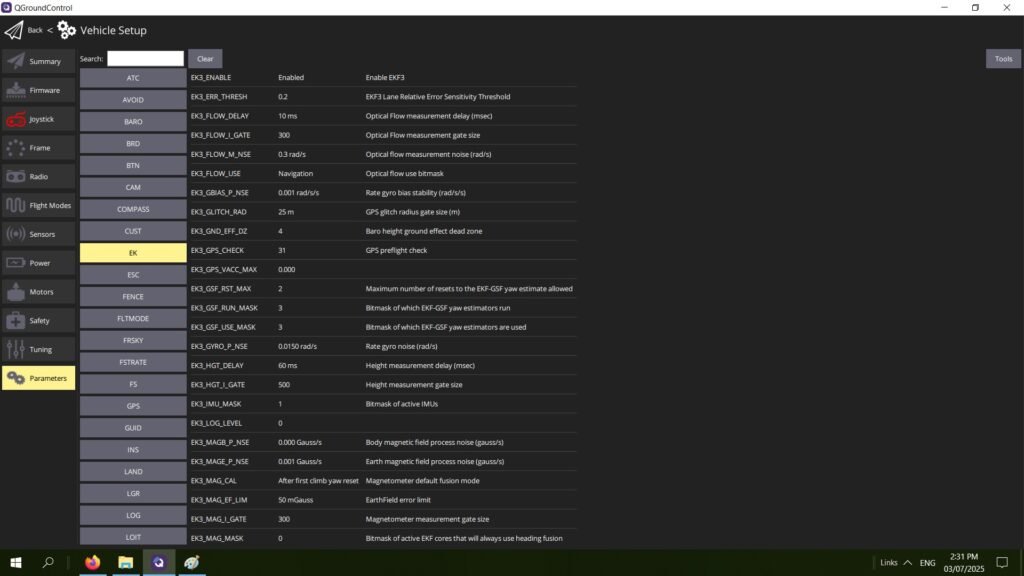
MOT_SPOOL_TIME 0.5 – this is ok for small drones however Large drones can take upto 2.0 to spool the motor up to idle mode. the must be set less than TKOFF_SLEW_TIME
MOT_SPIN_ARM 0.090 – Idle Speed of the motor after arming
MSK
GND EFFECT_COMP – the is active to compensate for ground effect
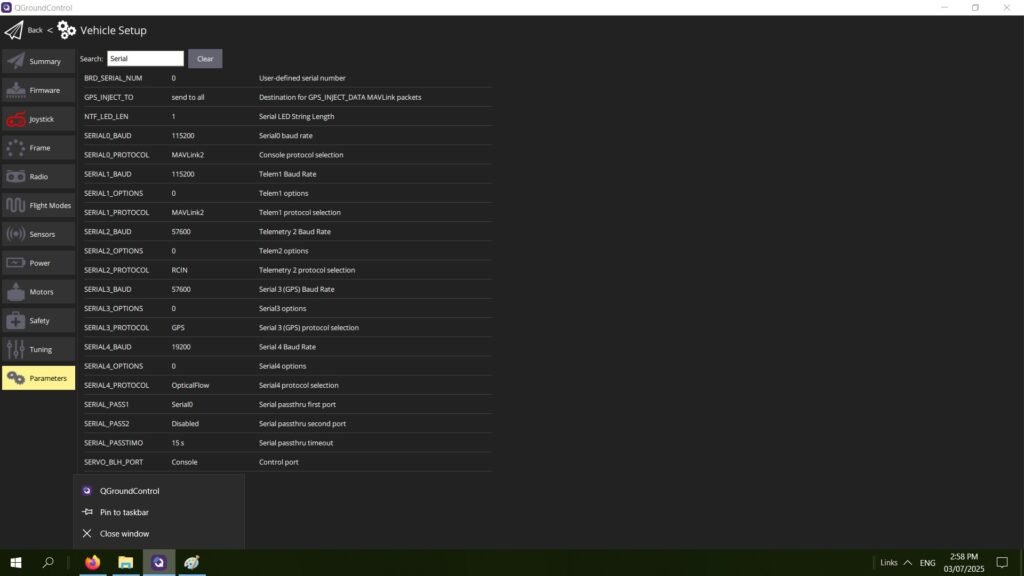
SERIAL
- Serial1 – UART1 – Mavlink2 – Tel
- Serial2 – UART2 – RCIN – SerialRC
- Serial3 – UART4 – GPS – Set Baud 57600
- Serial4 – UART6 – 0