
How Can We Help?
Multirotor

Tutorial/Documentation
Its Recommended you download and read both PDF instructions along with the other documentation and Reference on this page which provides assembly process and installation of the firmware or Scripts.
Blue * Marks important information and Files require to download
Synerduino Quick Build and Fly Guide .PDF*
Synerduino Basics .PDF
Synerduino Frame
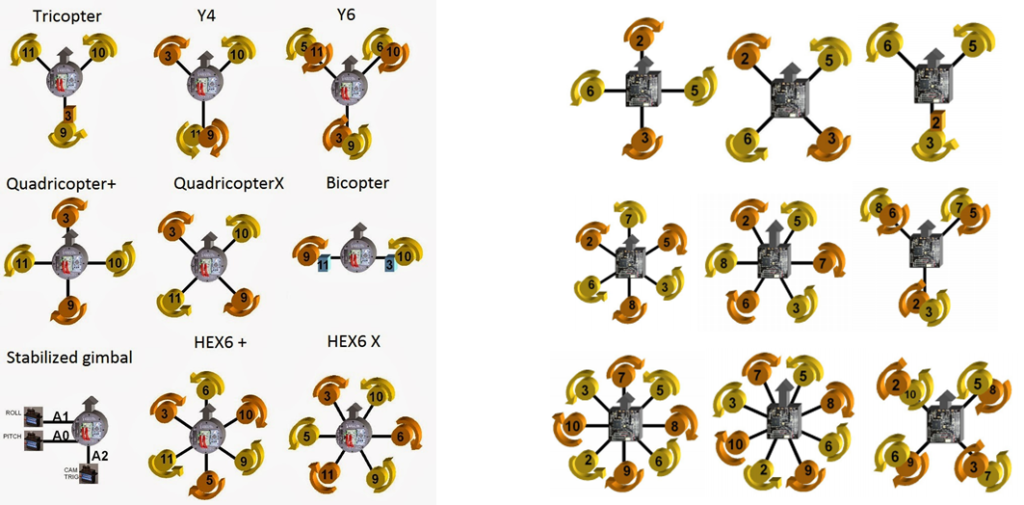
Each motor number Corresponding to the Digital Pin its connected to
GPS Flight Modes documentation .PDF
XLoader for Hex files Firmware upload to Arduino board*
Firmware only supports ( 2560 Mega Arduino Board ),
- Bluetooth Telemetry is hookup to Serial 0 for (HC05 -Bluetooth at Baud 115200) (0 + – Rx Tx)
- SIK Radio Telemetry is hookup to Serial 1 in Raw data mode at Baud 57600 (1 + – Rx Tx)
- Disconnect Bluetooth from Serial 0 when uploading Firmware or Configuring via USB
Hex firmware and calibration file
See: Synerduino Quick Build and Fly Guide .PDF*
FlwiiGUI Ground Station Software .EXE*
Synerduino Bluetooth Controller Android .APK*
PID Parameters Preset*
These PID presets are pre-tune and configure settings to get you started. (PID 250mm V1.1 Slow rate for the Synerduino Drone kit)
Misc files.
Synerduino Multirotor.INO
Arduino sketch file Support (Support M8-M10 NMEA – M7-M8 UBX) (2024)
Arduino Legacy sketch file (Support M5-M6 NMEA – M7-M8 UBX) (2020)
Telemetry SIK 3DR Radio
set both ground station and vehicle radio with same Net ID , Baud Rate, Mavlink as Raw Data Ensure the baud rate matches the Serial Com Speed Config.h of the synerduino Firmware